做過機器視覺模型訓練的人都知道,最耗時費力的階段,就是對圖片集進行標註的環節,這通常必須交由人力來進行,很難交給電腦去自動化標註,因此這個階段也是除了採購設備之外,成本最高的環節。
為了解決機器視覺領域的這個痛點,由Google實驗室的Matthias Minderer等人,提出了一種簡單而強大的OWL(Open-World Localization with Vision Transformers)方法,將影像級別的預訓練轉移到開放詞彙表目標偵測任務中。
使用標準的Vision Transformer架構,並對其進行了最小修改,透過對比影像-文本預訓練和端到端的目標偵測微調來實現,目標是為了實現“Zero Shot”的境界,其實就是要與YOLO的“One Shot”別苗頭。
不過總的來說,YOLO和OWL-ViT還是各有優勢的,適用於不同的應用場景。YOLO更側重於速度和即時性能,而OWL-ViT則在開放詞彙表和長尾分佈數據集上展現出更強的泛化能力,給定一個影像和一個自由文本查詢,它會在影像中找到與該查詢匹配的對象。它還可以進行一次性對象偵測,即基於單個示例影像偵測對象。
OWL-ViT是Google Research的Scenic專案之下的一個子專案,其開源倉位置在 https://github.com/google-research/scenic/tree/main/scenic/projects/owl_vit ,基於Python與JAX科學庫所搭建,開源倉所提供的安裝步驟依然很簡單,如下:
git clone https://github.com/google-research/scenic.git
cd ~/scenic
python -m pip install -vq .
python -m pip install -r scenic/projects/owl_vit/requirements.txt
# For GPU support:
pip install --upgrade "jax[cuda]" -f https://storage.googleapis.com/jax-releases/jax_cuda_releases.html
但實際的操作依舊是很難順利完成,總是出現如下圖的錯誤:

因此最簡單的方法,還是在Jetson Orin設備上使用Jetson AI Lab所提供的nanoowl映像檔來創建容器,這個容器不僅提供對CUDA的支持,並且也對TensorRT進行過優化。操作的指令如下:
$ jetson-container run --workdir /opt/nanoowl $(autotag nanoowl)
這裡使用“--workdir /opt/nanoowl”參數,就是將容器內的/opt/nanoowl設為指定的工作目錄,如果沒有添加這個參數,也可以進到容器之後再用“cd /opt/nanoowl”指令去切換。
現在我們先到examples裏,跑一跑最基本的owl_predict.py應用,先執行下面指令看一下所需要的參數:
$ cd examples
$ python3 owl_predict.py --help
下圖是執行--help所顯示的輸出,裏面總共有8個可調用的參數。
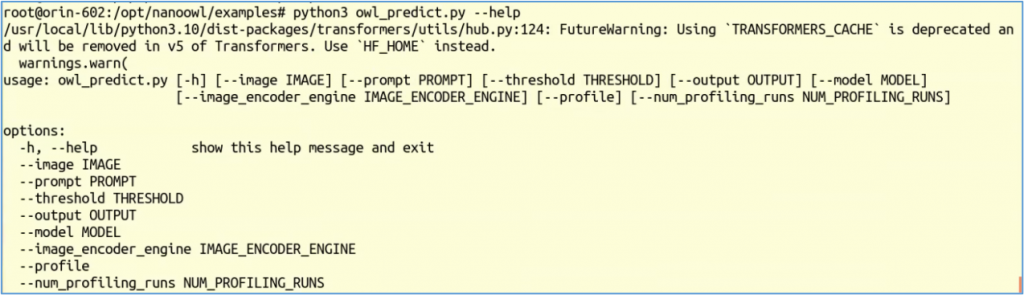
上面每個參數都提供預設值,這也是一種很好的防呆措施。以下列出每個參數的用途與預設值:
--image:圖片路徑,預設值 "../assets/owl_glove_small.jpg"--prompt:提示詞,預設值為 "[an owl, a glove]"--threshold:閾值,預設值為 "0.1,0.1"--output:輸出結果路徑,預設值 "../data/owl_predict_out.jpg"--model:使用的模型,預設值為 "google/owlvit-base-patch32"--image_encoder_engine:使用的圖片編碼引擎,預設值為"../data/owl_image_encoder_patch32.engine",這是用build_image_encoder_engine.py所訓練的模型。--profile:預設值為"store_true"--num_profiling_runs:預設值為30如果我們執行下面最簡單的指令,所有參數都用預設值:
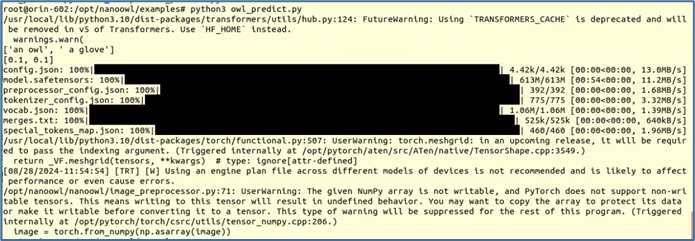
$ python3 owl_predict.py
第一次執行時,會如下圖一樣先下載所需要的模型到本地使用。
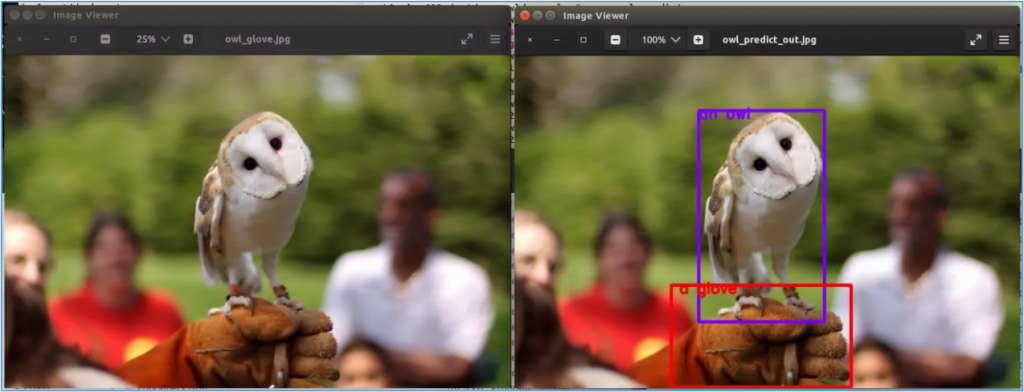
一切就緒之後就會開始執行。下圖左原圖是"../assets/owl_glove_small.jpg",根據提示詞"[an owl, a glove]"所執行的標識,圖右"../data/owl_predict_out.jpg"為輸出的結果。
如果覺得這種靜態圖片偵測不夠生動的話,我們可以執行examples/tree_demo下面的tree_demo.py程序,這是可以接上USB Camera直接對現場物體進行即時偵測的應用。如果先前啟動容器時還未連上USB Camera的話,請先跳出容器、連上USB Camera之後,再重新啟動容器,然後執行以下指令:
$ cd examples/tree_demo
$ python3 tree_demo.py ../../data/owl_image_encoder_patch32.engine
正確執行後會出現下面信息:
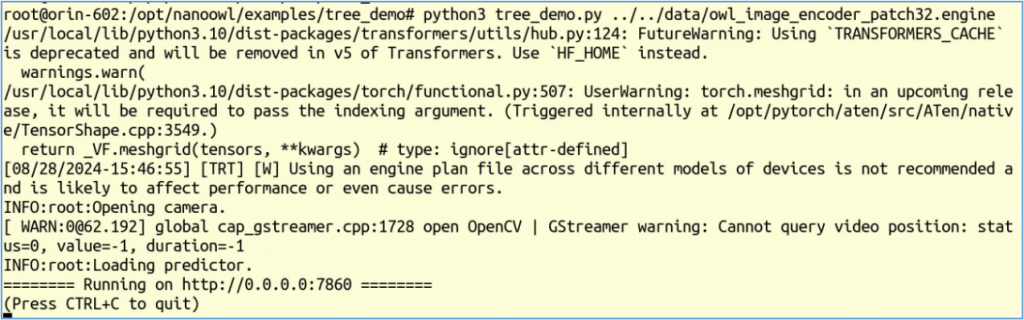
現在啟動瀏覽器,輸入“0.0.0.0:7860”後就會出現Camera畫面,下方出現可以互動的Prompt框,就可以在這里輸入多層提示語,然後看到畫面根據提示語找到目標。
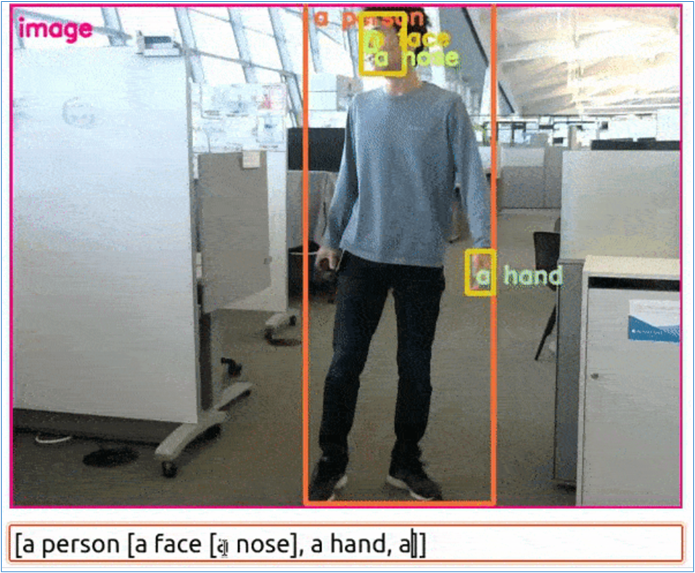
如何?這個應用很酷吧,可以用在非常多實用的場景,動態地找出一些特定的物體,還可以根據需求隨時修改要定位的物種。


 iThome鐵人賽
iThome鐵人賽