上篇談到現代的飛頭蠻,也就是無人機
所帶來的風險,那無人機有哪幾種?無人機的構造又是怎樣的呢?
一起來深入把飛頭蠻剖開看看裡面吧~
若依照應用領域分類,
無人機大約可以分成軍用級 ,商用級以及民用級
軍用級:
主要就是戰鬥以及偵查無人機,主要經過兩次世界大戰的洗禮,
技術上有飛躍性的進步:載重能力提升,隱蔽性變高,軍用價值提高,
無人化載具逐漸成為國防單位不可或缺的一部份。
商用級:

應用廣泛,隨著產業不同客製化不同無人機,
許多適合大範圍、環境險峻、空中作業等 自動化工程,
例如:山林工地地形圖繪製、大面積噴灑農藥、電纜鋪設工程等,
以上為農業和工業應用,服務業相關應用雖未全面發展起來,
但目前Uber 已經開始測試「空中送餐」等無人機配送服務系統
[相關連結]: https://www.bnext.com.tw/article/53650/uber-delivers-meals-with-drones,未來商用型無人機的發展可說是潛力無窮。
民用級:
民用級根據定價高低還可以區分成專業級、消費級、玩具級
較專業的無人機穩定性高、馬達較耐用、飛行時間較長、功能更多,大約萬元以上
而消費級穩定性沒專業級高、而馬達大多採用一般直流刷馬達
,飛行時間較沒那麼長,功能侷限,3000 ~ 10000台幣之間
玩具級大約 3000以下,
穩定性較弱、飛行時間最短、性能弱、鏡頭畫素一般,使用壽命不長。
這裡以民用級無人機為例,
無人機構造大約可以分成6個部分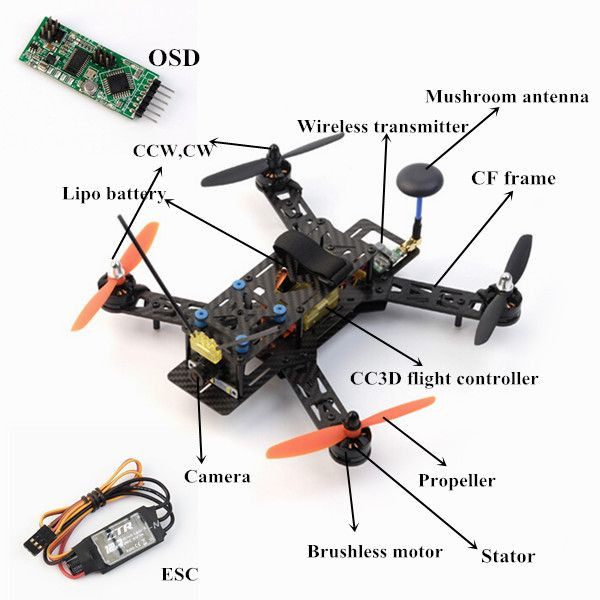

機身大小取決於翼獎的尺寸 + 馬達的體積,多採用輕物料材質,以降低整體負重
有些無人機使用碳纖、或玻璃纖維。
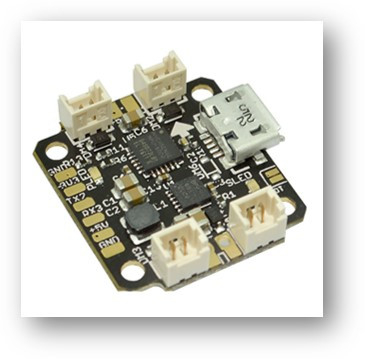
包含主控用的MCU,一些傳感器,例如:陀螺儀、加速度計、氣壓計 這些傳感器資訊可以用以判斷、穩定機身
註:MCU,將一般CPU頻率和規格做適當縮減
並且併入 記憶體、計數器、USB、A/D轉換、UART、DMA等周邊接口的微型控制器
而氣壓計數據 搭配 GPS定位資訊 則可以實現定高、定點、環繞等功能。

目前主流無人機使用的馬達有直流無刷馬達與空心杯馬達
透過對角方向旋槳轉向相反,使整體角動量守恆,並且旋槳往下擠壓空氣,
提供無人機本身的向上升力,無人機才得以穩定起飛。
ESC:電子調速器/電調控制器 (Electronic Speed Controller)
操作者透過PWM告訴ESC馬達該正還是反轉以及馬達運轉速度。

透過遙控器的搖桿讀數轉換成數位訊號
再進行調變並發送無線訊號至無人機的接收模組中
無人機的飛控系統再控制馬達進行相應的飛行動作
或者透過手機APP連接無人機的Wifi AP
透過Wifi對無人機進行操作,以及傳輸影像。
接收由無人機所發送的無線訊號
通常發射接收模組頻段是採2.4Ghz(干擾較多,但也有少數是採5Ghz
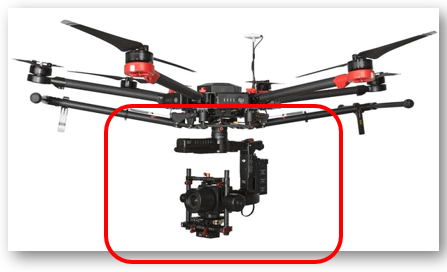
雲台是穩定空拍相機用的重要構件
分為固定雲台、電動雲台
其中電動雲台內也有伺服馬達控制鏡頭左右、上下旋轉。
了解了基本概念後,就可以拿起武器,開始反擊了。
[參考資料]:
https://www.facebook.com/geeksfans/posts/774756512701798/
[圖檔來源]:網路


 iThome鐵人賽
iThome鐵人賽