這篇文章使用LabVIEW配合MyRIO進行步進馬達的控制,我使用的步進馬達是小顆的那種,如果要用扭力較高的須配合馬達的驅動器,大家知道步進馬達的基本原理就是靠裡面的四顆磁鐵去輪流激磁而轉動,程式的整體概念就是用LabVIEW的Case Structure配合For loop讓馬達內的磁鐵不斷的激磁從而達到轉動,並且可以設置delay time控制速度,digital output是我的輸出腳位,要與步進馬達的四條線接一起,程式如下。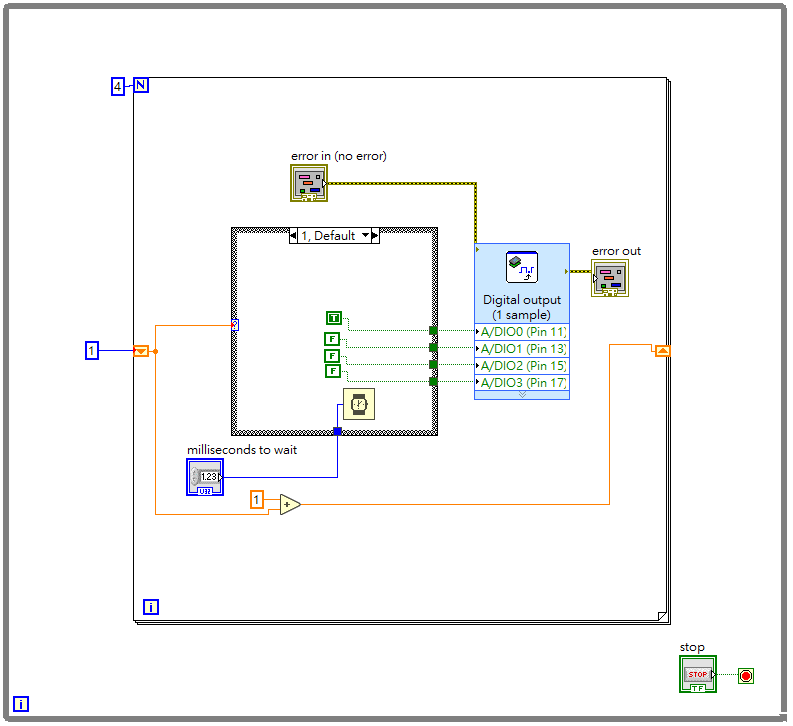
大家可以看到四張圖片就只是Case Structure的Case不同而已,並且每個Case都讓一個digital腳位輸出去激磁然後重複四次,一直連續重複就可以旋轉了,如果要讓他反轉只要該一下For loop就可以,這篇只是初階之後有機會再將正反轉,控制轉幾圈貼上來給大家看。
 eatsk
eatsk
