其實dVRK的wiki寫的不錯,只是真的內容好多.雖然有一小部分似乎是要加入那40個研究機構才看的到,但我寫信問Professor Anton Deguet,他說沒差,大多在dVRK wiki其他地方會有.
我是參考這篇,在沒有硬體下,跑模擬
但我有先修正python呼叫路徑
sudo apt install python-is-python3 #我是直接改,也可以用其他方式修正python呼叫不到python3
然後分別開terminal,分別執行MTML或PSM1或ECM,
其中ECM比較有趣
# NOTE
# 1) please use your own ROS workspace path
# 2) please use the right console json file (see sawIntuitiveResearchKit/share foler)
# MTML
roslaunch dvrk_robot dvrk_arm_rviz.launch arm:=MTML \
config:=/home/$(whoami)/catkin_ws/src/cisst-saw/sawIntuitiveResearchKit/share/console/console-MTML_KIN_SIMULATED.json
# PSM1
roslaunch dvrk_robot dvrk_arm_rviz.launch arm:=PSM1 \
config:=/home/$(whoami)/catkin_ws/src/cisst-saw/sawIntuitiveResearchKit/share/console/console-PSM1_KIN_SIMULATED.json
# ECM
roslaunch dvrk_robot dvrk_arm_rviz.launch arm:=ECM \
config:=/home/$(whoami)/catkin_ws/src/cisst-saw/sawIntuitiveResearchKit/share/console/console-ECM_KIN_SIMULATED.json
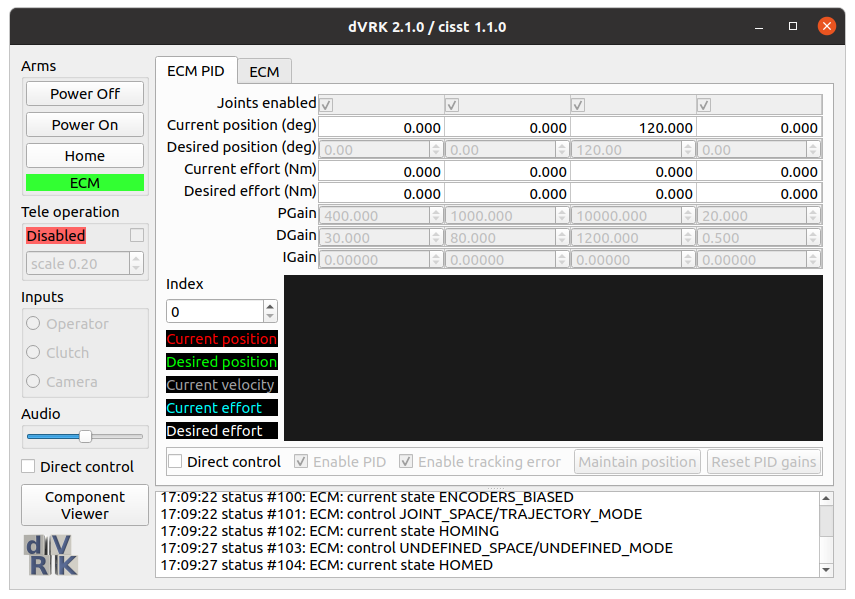
在左邊先Power Off,然後按Home,你可以在Rviz看到整個PSM1手臂前端動(影片)
MTM是指醫師操做主控台的控制手臂,L跟M是左右手,是8 DoF.(影片中,左半邊,人控制的是MTMR)
ECM是指深入病人體內的camera.
PSM是指深入病人體內的機器手臂,有3支標示為1,2,3.是7 DoF(影片中,右半邊)
SUJ主機台一部份,以及paper常見縮寫
因為沒有硬體,所以我們無法看到直接控制(影片連結),一些看裝備的~/catkin_ws/devel/bin/qlatest跟qladisp的命令是找不到設備. Linux內建的' ls -al /dev/fw*'命令也是沒有東西. 強迫跑 'rosrun rviz rviz ~/catkin_ws/src/dvrk-ros/dvrk_model/rviz_config/PSM1.rviz' 不會有動作, 強迫跑'rosrun dvrk_python dvrk_arm_test.py -a PSM1'或者'sawRobotIO1394QtConsole -c sawRobotIO1394-PSM1-12345.xml'因找不到設備後跳開.
 jaujie
jaujie
