在使用Google maps導航時,都需要走一段路來判斷目前的方位。
假設我設計一個機器人,沒有前後左右之分,那麼該如何規劃他的移動路徑。
圖源:https://www.bnext.com.tw/ext_rss/view/id/1469262
解決方法是綜合以下建議,採購了地磁感測器(HMC5883L)。每次使用前都先校正到指向北方後,在規劃如何移動
已邀請的邦友 {{ invite_list.length }}/5
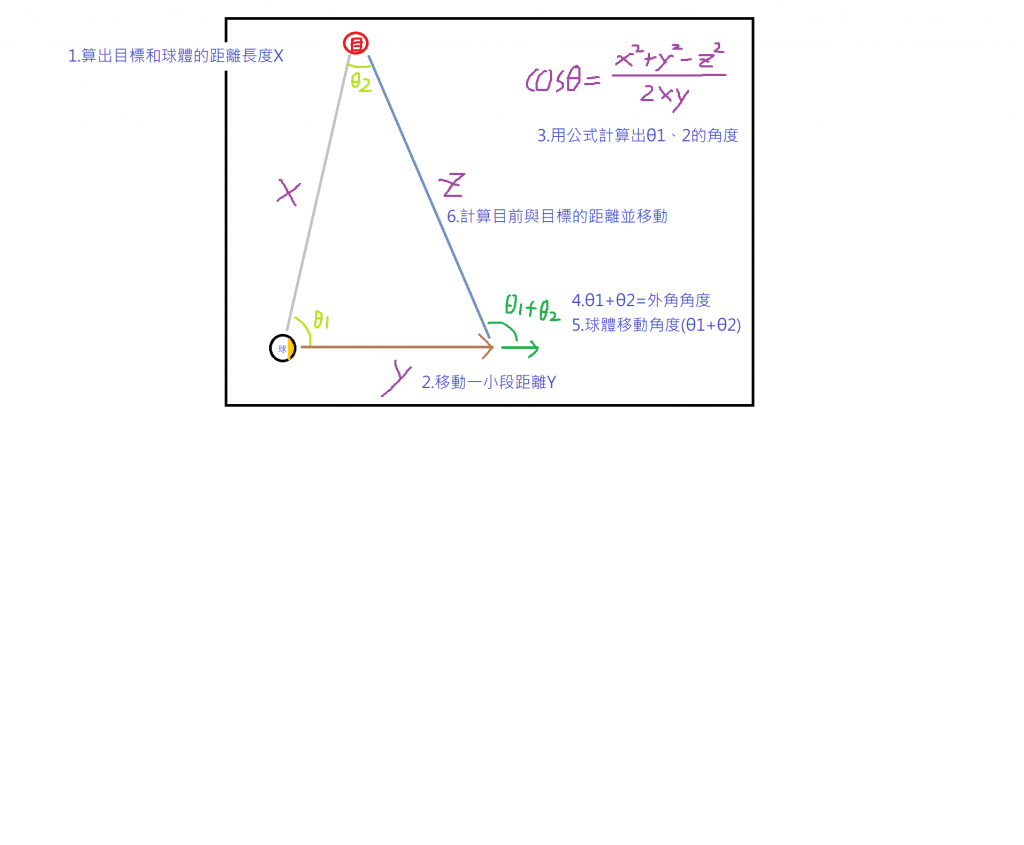
假設你使用GPS來辨認方向,當從地下出來,分不清方向要怎麼辦?
難道你會愣在那裏不動?
還是隨意前進一會兒,待GPS變出方位,再修正行走方向