 ``import math
``import math
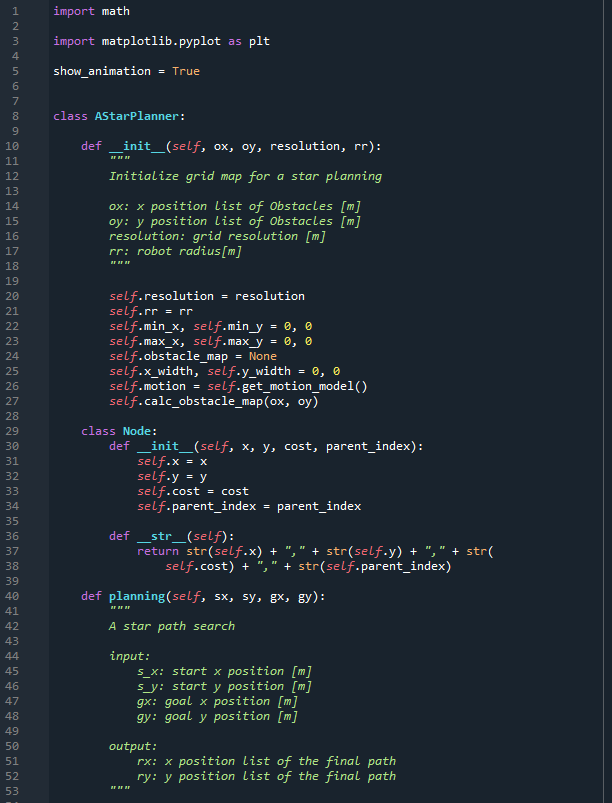
import matplotlib.pyplot as plt
show_animation = True
class AStarPlanner:
def __init__(self, ox, oy, resolution, rr):
"""
Initialize grid map for a star planning
ox: x position list of Obstacles [m]
oy: y position list of Obstacles [m]
resolution: grid resolution [m]
rr: robot radius[m]
"""
self.resolution = resolution
self.rr = rr
self.min_x, self.min_y = 0, 0
self.max_x, self.max_y = 0, 0
self.obstacle_map = None
self.x_width, self.y_width = 0, 0
self.motion = self.get_motion_model()
self.calc_obstacle_map(ox, oy)
class Node:
def __init__(self, x, y, cost, parent_index):
self.x = x
self.y = y
self.cost = cost
self.parent_index = parent_index
def __str__(self):
return str(self.x) + "," + str(self.y) + "," + str(
self.cost) + "," + str(self.parent_index)
def planning(self, sx, sy, gx, gy):
"""
A star path search
input:
s_x: start x position [m]
s_y: start y position [m]
gx: goal x position [m]
gy: goal y position [m]
output:
rx: x position list of the final path
ry: y position list of the final path
"""
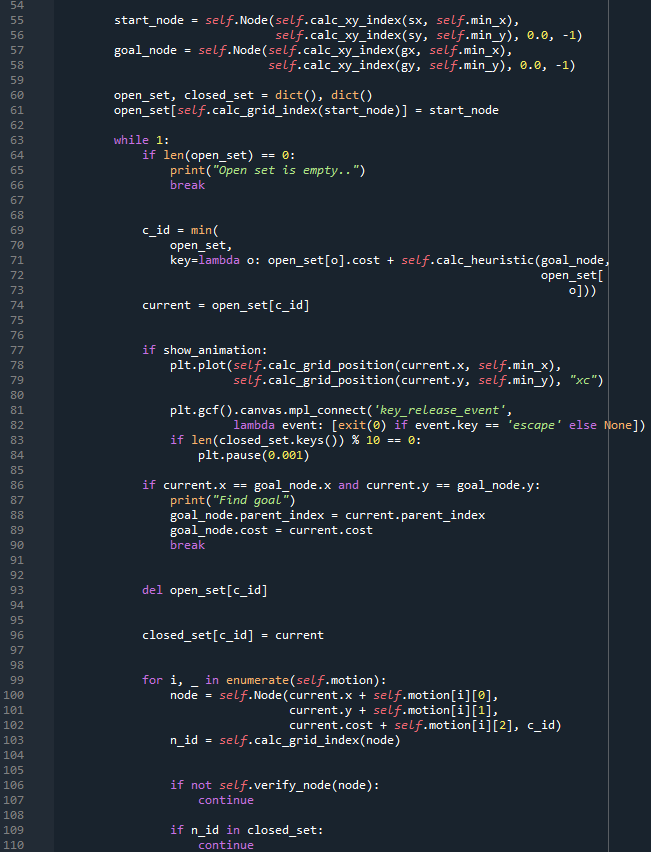
start_node = self.Node(self.calc_xy_index(sx, self.min_x),
self.calc_xy_index(sy, self.min_y), 0.0, -1)
goal_node = self.Node(self.calc_xy_index(gx, self.min_x),
self.calc_xy_index(gy, self.min_y), 0.0, -1)
open_set, closed_set = dict(), dict()
open_set[self.calc_grid_index(start_node)] = start_node
while 1:
if len(open_set) == 0:
print("Open set is empty..")
break
c_id = min(
open_set,
key=lambda o: open_set[o].cost + self.calc_heuristic(goal_node,
open_set[o]))
current = open_set[c_id]
if show_animation:
plt.plot(self.calc_grid_position(current.x, self.min_x),
self.calc_grid_position(current.y, self.min_y), "xc")
plt.gcf().canvas.mpl_connect('key_release_event',
lambda event: [exit(0) if event.key == 'escape' else None])
if len(closed_set.keys()) % 10 == 0:
plt.pause(0.001)
if current.x == goal_node.x and current.y == goal_node.y:
print("Find goal")
goal_node.parent_index = current.parent_index
goal_node.cost = current.cost
break
del open_set[c_id]
closed_set[c_id] = current
for i, _ in enumerate(self.motion):
node = self.Node(current.x + self.motion[i][0],
current.y + self.motion[i][1],
current.cost + self.motion[i][2], c_id)
n_id = self.calc_grid_index(node)
if not self.verify_node(node):
continue
if n_id in closed_set:
continue
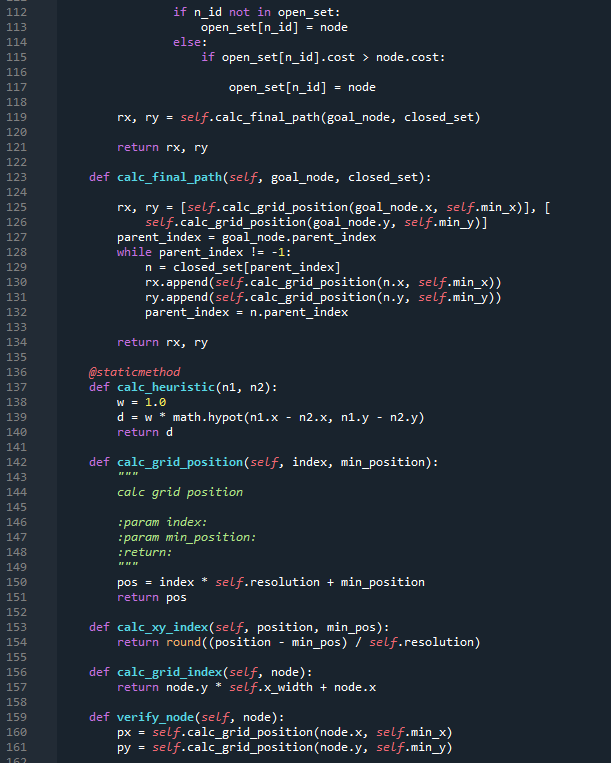
if n_id not in open_set:
open_set[n_id] = node
else:
if open_set[n_id].cost > node.cost:
open_set[n_id] = node
rx, ry = self.calc_final_path(goal_node, closed_set)
return rx, ry
def calc_final_path(self, goal_node, closed_set):
rx, ry = [self.calc_grid_position(goal_node.x, self.min_x)], [
self.calc_grid_position(goal_node.y, self.min_y)]
parent_index = goal_node.parent_index
while parent_index != -1:
n = closed_set[parent_index]
rx.append(self.calc_grid_position(n.x, self.min_x))
ry.append(self.calc_grid_position(n.y, self.min_y))
parent_index = n.parent_index
return rx, ry
@staticmethod
def calc_heuristic(n1, n2):
w = 1.0
d = w * math.hypot(n1.x - n2.x, n1.y - n2.y)
return d
def calc_grid_position(self, index, min_position):
"""
calc grid position
:param index:
:param min_position:
:return:
"""
pos = index * self.resolution + min_position
return pos
def calc_xy_index(self, position, min_pos):
return round((position - min_pos) / self.resolution)
def calc_grid_index(self, node):
return node.y * self.x_width + node.x
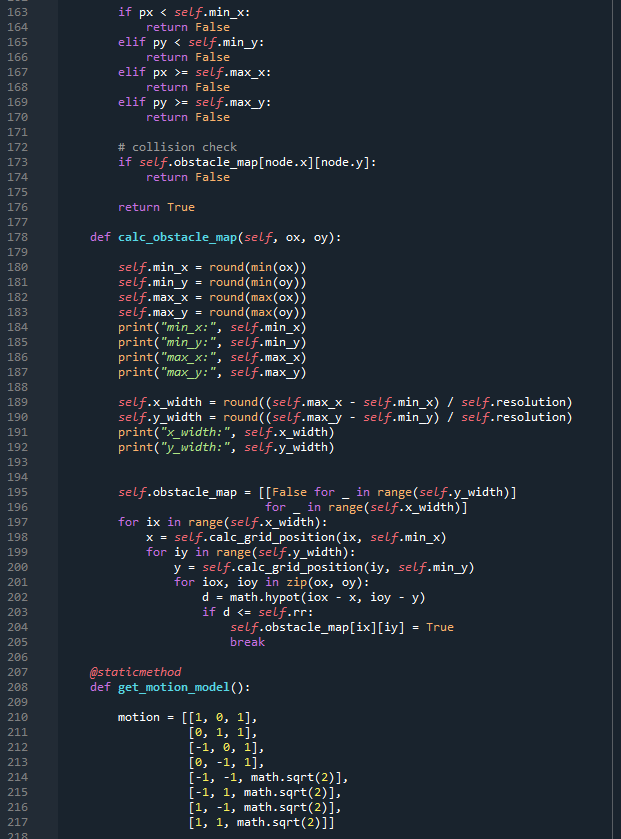
def verify_node(self, node):
px = self.calc_grid_position(node.x, self.min_x)
py = self.calc_grid_position(node.y, self.min_y)
if px < self.min_x:
return False
elif py < self.min_y:
return False
elif px >= self.max_x:
return False
elif py >= self.max_y:
return False
# collision check
if self.obstacle_map[node.x][node.y]:
return False
return True
def calc_obstacle_map(self, ox, oy):
self.min_x = round(min(ox))
self.min_y = round(min(oy))
self.max_x = round(max(ox))
self.max_y = round(max(oy))
print("min_x:", self.min_x)
print("min_y:", self.min_y)
print("max_x:", self.max_x)
print("max_y:", self.max_y)
self.x_width = round((self.max_x - self.min_x) / self.resolution)
self.y_width = round((self.max_y - self.min_y) / self.resolution)
print("x_width:", self.x_width)
print("y_width:", self.y_width)
self.obstacle_map = [[False for _ in range(self.y_width)]
for _ in range(self.x_width)]
for ix in range(self.x_width):
x = self.calc_grid_position(ix, self.min_x)
for iy in range(self.y_width):
y = self.calc_grid_position(iy, self.min_y)
for iox, ioy in zip(ox, oy):
d = math.hypot(iox - x, ioy - y)
if d <= self.rr:
self.obstacle_map[ix][iy] = True
break
@staticmethod
def get_motion_model():
motion = [[1, 0, 1],
[0, 1, 1],
[-1, 0, 1],
[0, -1, 1],
[-1, -1, math.sqrt(2)],
[-1, 1, math.sqrt(2)],
[1, -1, math.sqrt(2)],
[1, 1, math.sqrt(2)]]
return motion
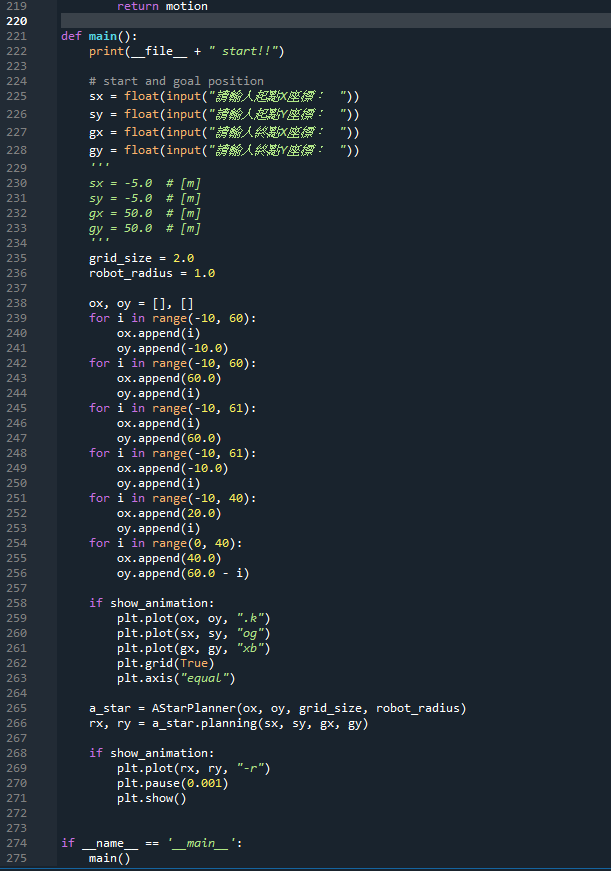
def main():
print(file + " start!!")
sx = float(input("請輸入起點X座標: "))
sy = float(input("請輸入起點Y座標: "))
gx = float(input("請輸入終點X座標: "))
gy = float(input("請輸入終點Y座標: "))
'''
sx = -5.0 # [m]
sy = -5.0 # [m]
gx = 50.0 # [m]
gy = 50.0 # [m]
'''
grid_size = 2.0
robot_radius = 1.0
ox, oy = [], []
for i in range(-10, 60):
ox.append(i)
oy.append(-10.0)
for i in range(-10, 60):
ox.append(60.0)
oy.append(i)
for i in range(-10, 61):
ox.append(i)
oy.append(60.0)
for i in range(-10, 61):
ox.append(-10.0)
oy.append(i)
for i in range(-10, 40):
ox.append(20.0)
oy.append(i)
for i in range(0, 40):
ox.append(40.0)
oy.append(60.0 - i)
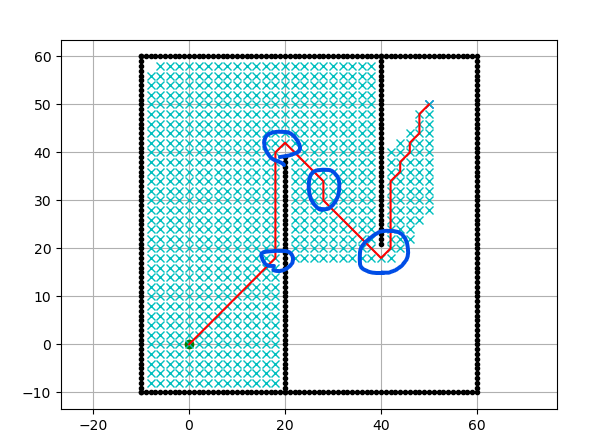
if show_animation:
plt.plot(ox, oy, ".k")
plt.plot(sx, sy, "og")
plt.plot(gx, gy, "xb")
plt.grid(True)
plt.axis("equal")
a_star = AStarPlanner(ox, oy, grid_size, robot_radius)
rx, ry = a_star.planning(sx, sy, gx, gy)
if show_animation:
plt.plot(rx, ry, "-r")
plt.pause(0.001)
plt.show()
if name == 'main':
main()
已邀請的邦友 {{ invite_list.length }}/5