全名為 Universal Asynchronous Receiver/Transmitter,讀做"U-R",
晶片之間最常用的通訊方式應該就是UART了,
只需要兩條線就可以完成雙向的溝通,
但與I2C 不同的是,
UART 為同時可以接收訊號以及發送訊號,
因為這兩條線是兩條相反方向的單行道,
通常我們會把這兩條線稱作TX 和RX ,
這邊要特別注意,
TX 和RX 在兩個設備間是相反的,
如下圖(取自Circuit Basics):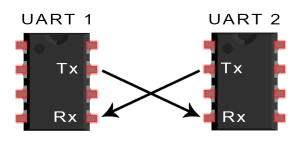
使用UART 除了要注意線路的定義之外,
再來就是UART 的參數,
最常用的參數有:
UART 依照晶片的工作電壓,可能會有不同的準位,
一般常見的有5V和3V(3.3V)兩種準位,
Arduino 使用的就是5V 的UART,
CC2642R 使用的則是3.3V 的UART,
Arduino 和 CC2642R 如果要使用UART來互相溝通,
中間必須要先經過電位轉換兩邊才能正常通訊。
UART 就是那麼簡單,
祝大家連假平安又愉快!
不論假期您過得樸實抑或喧,
最終,
別忘了,
10/14(一)回到崗位繼續奮戰。
參考文章:

