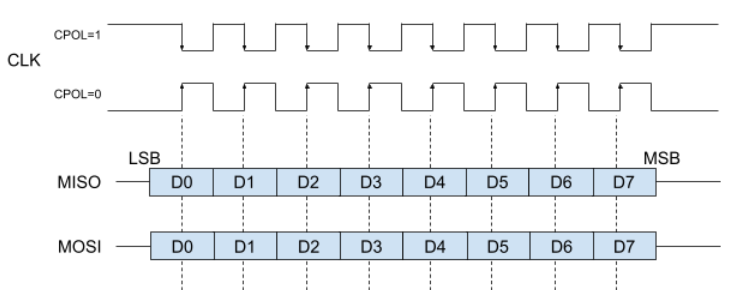
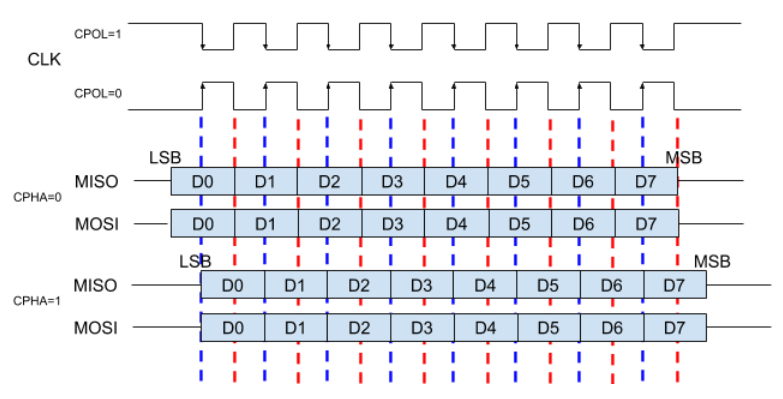
昨天介紹到spi基本協議的樣子,今天在講講四種模式的差別,個別有兩個模式名層:
參考網站:https://makerpro.cc/2020/04/spi-interface-part3/
我已經把精華的地方濃縮出來了,這樣也方便我日後複習
搜索到這系列
從第一篇文看到這篇覺得也太厲害了
從規劃>洗版>實作協定
好奇已經入坑多久了@@
以一個純軟看這系列覺得很厲害
可以做出實體東西搞得現在很想轉行韌體
((只碰過arduino跟樹莓派
從完全不懂韌體是什麼東西到現在,大概約1年多一點
我剛開始都是看野火的教學,沒有全部看完,大概看了教學前面3成而已,我還很多都不懂,像看看門狗的意思還有RTC實際的時鐘如何使用,如何使用內部Flash,內部Flash主要是拿來存程式碼的地方,其實還有一部份是可以拿來給使用者用的。

