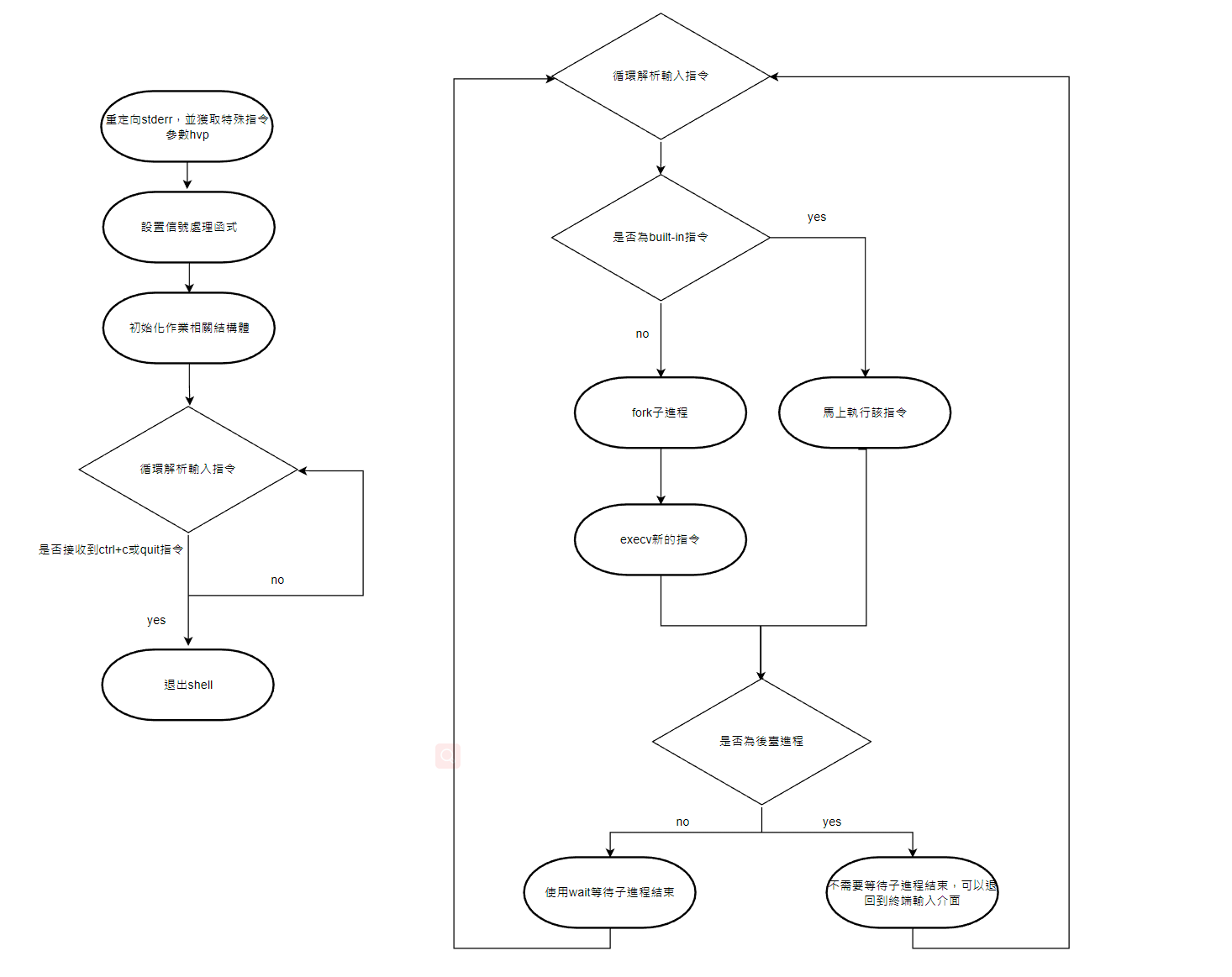
本實驗要求我們編寫一個供使用者交互的終端介面,類似於Linux中的shell終端。實驗中我們需要先解析輸入指令(這些指令可能包含多個參數),且指令必須支持進程背景執行。
另一個重點是該實驗模擬Unix系統中的作業控制(Job Control),對創建的進程進行監控與管理(增、刪、改、查)。同時為了避免交互過程產生殭屍進程(Zombie),我們需要編寫特殊的信號處理函式,並且該終端也要可以被Ctrl + C,Ctrl + Z退出程序和暫停程序。
細節部分可以參考資料夾中的tshlab.pdf中的The tsh Specification;程式編寫環節方面可以參考資料夾中的shlab.pdf整份文件
本次實驗需要編寫7個函式,分別是:
eval: 解析使用者輸入的指令builtin_cmd: 執行原生的指令
quit: 直接結束shelljobs: 列出當前執行中和中止的背景進程bg: 將中止的背景進程變成運行中的背景進程fg: 將中止的背景進程轉換成運行中的前臺進程do_bgfg: 實現bg, fg指令waitfg: 等待前臺進程結束sigchld_handler: SIGCHLD的信號處理函式sigint_handler: SIGINT的信號處理函式sigstp_handler: SIGTSTOP的信號處理函式該實驗的作業控制就是存放進程的PID, JID(作業編號),進程狀態,在編寫函式過程中要考慮到操作是否會變動的進程狀態,進而需要調用lab提供的Helper函式,例如
addjob()
編寫eval的重點在創建子進程部分,也就是fork後使用execve加載指令bin檔這部分。由於fork指令的特性,我們無法保證父進程部分程式碼會先執行,有可能在添加作業前,SIGCHLD就已經抵達,所以在fork前要先對SIGCHLD進行屏蔽
void eval(char *cmdline) {
/* error handler */
if(cmdline == NULL){
return;
}
char *argv[MAXARGS] = {0};
char buffer[MAXLINE] = {0};
int bg;
pid_t pid;
sigset_t mask_all, mask_one, prev_one;
/* 創建遮罩用來阻擋信號SIGCHLD */
sigfillset(&mask_all);
sigemptyset(&mask_one);
sigaddset(&mask_one, SIGCHLD);
strcpy(buffer, cmdline);
/* 判斷該指令是否為後臺進程 */
bg = parseline(buffer, argv);
/* if command is a empty command, then return */
if(argv[0] == NULL){
return;
}
/* 是否為built-in command */
if(!builtin_cmd(argv)){
/* 為了避免race condition,確保邏輯是先添加進程再觸發SIGCHLD */
Sigprocmask(SIG_BLOCK, &mask_one, &prev_one);
/* fork a child process */
if((pid = Fork()) == 0){
/* 子進程會繼承父進程的信號向量表,所以需要unblock SIGCHLD,避免加載的進程無法觸發SIGCHLD */
Sigprocmask(SIG_SETMASK, &prev_one, NULL); // unblock SIGCHLD
setpgid(0, getpid()); // set process group id
if(execve(argv[0], argv, environ) < 0){
printf("%s: Command not found.\n", argv[0]);
exit(0);
}
}
/* 該遮罩確保添加作業過程不會被其他信號中斷 */
Sigprocmask(SIG_BLOCK, &mask_all, NULL); // block all signals
addjob(jobs, pid, (bg ? BG : FG), buffer); // add job
/* 回復成原先狀態,允許接收SIGCHLD信號 */
Sigprocmask(SIG_SETMASK, &prev_one, NULL); // unblock all signals
/* 前臺進程需要等待子進程結束 */
if(!bg){
waitfg(pid);
}
/* 若為後臺進程則打印進程相關信息後退出 */
else{
#if (DEBUG_LOG)
int i=1;
strcpy(debug_log, argv[0]);
while(argv[i]){
strcat(debug_log, " ");
strcat(debug_log, argv[i++]);
}
printf("[%d] (%d) %s &\n", getjobpid(jobs, pid)->jid, pid, debug_log);
#endif
}
}
return;
}
builtin_cmd較為簡單,只需要依照相應的指令執行就可以了,重點在於bg, fg這兩個指令。若為built-in command則反為1,否則返回0
int builtin_cmd(char **argv) {
int ret = 1;
/* 退出程序 */
if(!strcmp(argv[0], "quit")){
exit(0);
}
/* 列出後臺進程信息 */
else if(!strcmp(argv[0], "jobs")){
listjobs(jobs);
// listbgjobs(jobs); // list only back ground job
}
/* restarts job by sending it a SIGCONT signal, and then runs it in the
background. The job argument can be either a PID or a JID. */
else if(!strcmp(argv[0], "bg")){
do_bgfg(argv);
}
/* restarts job by sending it a SIGCONT signal, and then runs it in the
foreground. The job argument can be either a PID or a JID. */
else if(!strcmp(argv[0], "fg")){
do_bgfg(argv);
}
/* not a builtin command (include invalid syntax) */
else{
ret = 0;
}
return ret;
}
該函式是針對中止狀態的背景進程的操作。首先需要發送信號SIGCONT將進程狀態更改成運行中,若運行後的進程是前臺進程就等待,反之就退出就好了(記得要調用作業控制函式去修改全局作業變數的狀態!)
fg, bg後面可以接上PID, 或JID(作業編號),例如fg 1000,若是使用作業編號要加上特殊符號%,例如fg %1
void do_bgfg(char **argv) {
/* error handler */
if(argv == NULL){
return;
}
/* 判斷是執行fg還是bg */
u_int8_t fgbg = 1; // define 0 for front ground; 1 for back ground
fgbg = strcmp(argv[0], "bg") == 0;
if(argv[1] == NULL){
printf("%s command requires PID or %%jobid argument\n", argv[0]);
return;
}
int target_jid;
pid_t target_pid;
struct job_t* job_ptr;
/* 參數是針對jid */
if(argv[1][0] == '%'){
target_jid = atoi(argv[1]+1);
if(!target_jid){
printf("%s: argument must be a PID or %%jobid\n", argv[0]);
return;
}
if((job_ptr = getjobJid(jobs, target_jid)) == NULL){
printf("%%%d: No such job\n", target_jid);
return;
}
}
/* 參數是針對pid */
else{
target_pid = atoi(argv[1]);
if(!target_pid){
printf("%s: argument must be a PID or %%jobid\n", argv[0]);
return;
}
if((job_ptr = getjobpid(jobs, target_pid)) == NULL){
printf("(%d): : No such process\n", target_pid);
return;
}
}
/* 發送信號給指定進程 */
Kill(-(job_ptr->pid), SIGCONT); // Continue if stopped
switch (fgbg){
/* 若為前臺進程,則需要等待進程結束 */
case FRONT_GROUND:
job_ptr->state = FG;
waitfg(job_ptr->pid);
break;
/* 後臺進程打印信息後退出即可 */
case BACK_GROUND:
job_ptr->state = BG;
#if (DEBUG_LOG)
printf("[%d] (%d) %s", job_ptr->jid, job_ptr->pid, job_ptr->cmdline);
#endif
break;
case UNKNOWED:
#if (DEBUG_LOG)
printf("fatal errror! fgbg is neither 0 nor 1\n");
#endif
exit(1);
break;
}
}
用來等待前臺進程結束,循環等待子進程結束,然後觸發SIGCHLD信號處理函式後回收子進程
void waitfg(pid_t pid){
if(pid <= 0){
return;
}
struct job_t* fg = getjobpid(jobs, pid);
if(fg == NULL){
return;
}
sigset_t mask;
/* 阻擋除了SIGCHLD以外的所有信號 */
sigfillset(&mask);
sigdelset(&mask, SIGCHLD);
sigdelset(&mask, SIGINT);
sigdelset(&mask, SIGTSTP);
/* 等待SIGCHLD信號 */
for(; fgpid(fg) != 0; ){
Sigsuspend(&mask); // suspend until SIGCHLD arrives
}
}
回收前後臺進程並打印子進程結束資訊,注意該函式不會阻塞等待子進程。為了確保執行信號處理函式過程中不被其他信號打斷,可以先行阻擋其他信號
void sigchld_handler(int sig) {
sigset_t mask, prev;
int stat, olderr = errno; // save original errno
pid_t pid;
sigfillset(&mask);
/* 阻擋其他信號 */
Sigprocmask(SIG_BLOCK, &mask, &prev);
while((pid = waitpid(-1, &stat, WNOHANG | WUNTRACED)) > 0){
/* 進程正常退出 */
if(WIFEXITED(stat)){
#if (DEBUG_LOG)
// sprintf(debug_log, "child process [pid: %d] is terminated normally\n", pid);
// Sio_print(debug_log);
#endif
/* 刪除作業 */
deletejob(jobs, pid);
}
/* 子進程被信號中止 */
else if(WIFSIGNALED(stat)){
#if (DEBUG_LOG)
sprintf(debug_log, "Job [%d] (%d) terminated by signal %d\n", getjobpid(jobs, pid)->jid, pid, WTERMSIG(stat));
Sio_print(debug_log);
#endif
/* 刪除作業 */
deletejob(jobs, pid);
}
/* 子進程被信號中止 */
else if(WIFSTOPPED(stat)){
#if (DEBUG_LOG)
sprintf(debug_log, "Job [%d] (%d) stopped by signal %d\n",
getjobpid(jobs, pid)->jid, pid, WSTOPSIG(stat));
Sio_print(debug_log);
#endif
struct job_t* target = getjobpid(jobs, pid);
target->state = ST;
}
/* 中止的子進程收到信號SIGCONT */
else if(WIFCONTINUED(stat)){
#if (DEBUG_LOG)
sprintf(debug_log, "child JID: %d, PID: %d is resumed by signal SIGCONT\n",
pid2jid(pid), pid);
Sio_print(debug_log);
#endif
}
}
/* 解鎖 */
Sigprocmask(SIG_SETMASK, &prev, NULL);
errno = olderr; // restore erron
return;
}
ctrl + c的信號處理函式,直接發送一個SIGINT信號給前臺進程組為pid的所有進程
void sigint_handler(int sig) {
pid_t pid = fgpid(jobs);
if(pid == 0){
Sio_print("No front ground job!\n");
return ;
}
Kill(-pid, SIGINT); // close front ground process group
return;
}
ctrl + z的信號處理函式,直接發送一個SIGTSTP信號給前臺進程組為pid的所有進程
void sigtstp_handler(int sig) {
pid_t pid = fgpid(jobs);
if(pid == 0){
Sio_print("No front ground job!\n");
return ;
}
Kill(-pid, SIGTSTP); // stop front ground process group
return;
}
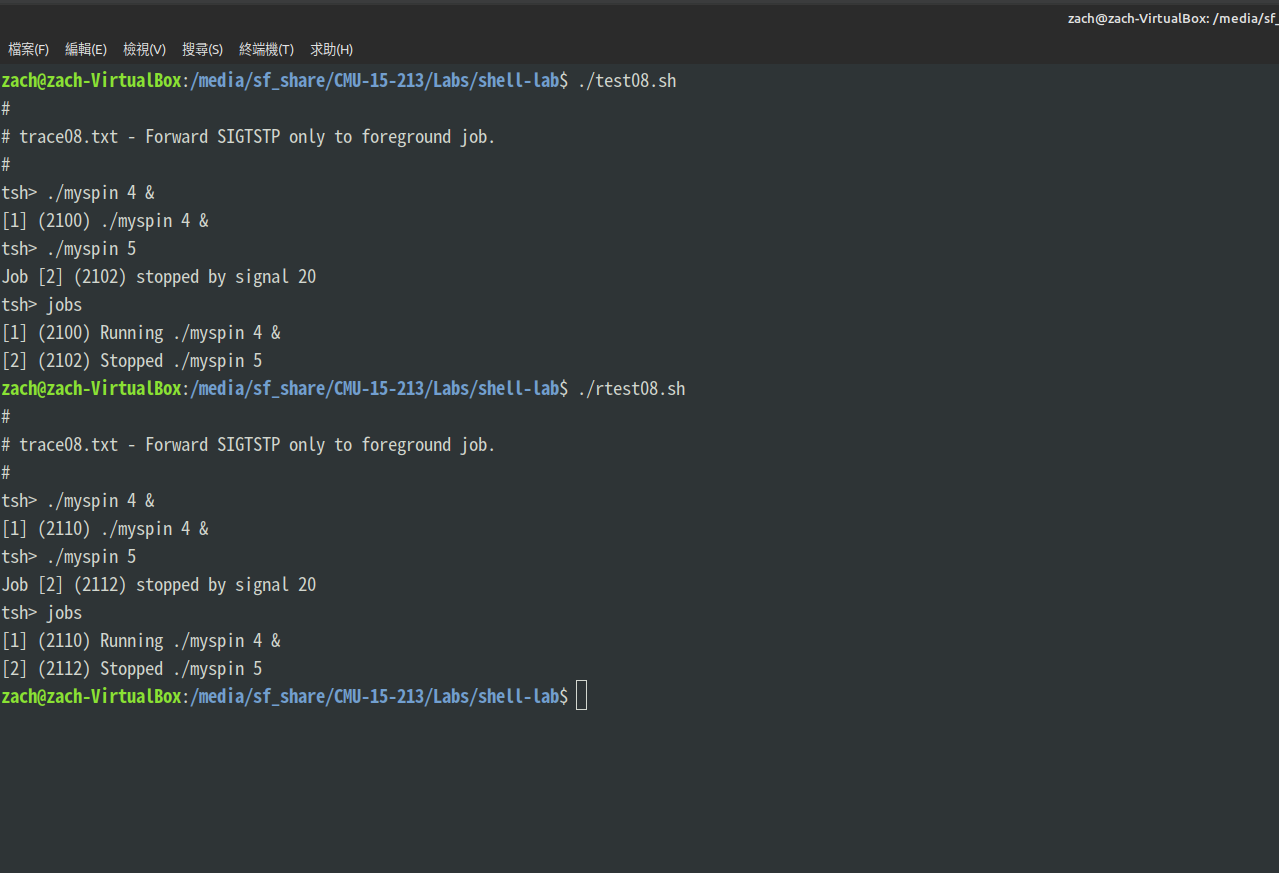
在檔案資料夾中可以發現trace01~16文件,該文件可以自動化測試指令。在編寫完上述函式後首先可以先自行測試編譯完成後的tsh檔是否符合預期,簡單的執行./tsh進行調適會比直接使用trace文件測試來的方便,也較好debug
使用make編譯整個文件後會生成tsh和tshref兩個可執行檔,我們可以使用指令./sdriver.pl -t traceXX.txt -s ./tsh -a "-p"來進行驗證,例如:
./sdriver.pl -t trace08.txt -s ./tsh -a "-p"
./sdriver.pl -t trace08.txt -s ./tshref -a "-p"
tsh的執行結果要和tshref一模一樣(除了進程PID以外)
 Zacch
Zacch
