我們前面應用NanoLLM開發平台,已經很輕鬆地創造出語音對話助手、多模態識別等應用,本篇文章要更進一步調用NanoLLM的影片相關API,搭配合適的大語言模型,來對影片檔或攝影機獲取的內容進行動態分析功能。
這裡我們將模型換成同樣支持多模態的Efficient-Large-Model/VILA1.5-3b,並且前後使用3個API來進行測試,大家可以相互比較一下,並且後續自行調整出最適合應用場景的內容。
如果想用自己的USB攝影機進行測試,請在進入容器之前就先將攝影機插到設備上,然後再執行以下指令進入NanoLLM容器:
$ jetson-containers run $(autotag nano_llm)
進入容器之後,可以先執行以下指令檢查是否檢測到攝影機:
$ ls /dev/video*
如果有看到反應,就表示在容器內已經找到攝影機了。
現在我們還是先從簡單的nano_llm.chat聊天功能以及圖片/影片內容識別開始。這些需要提供兩個prompt給nano_llm.chat,系統會從第一個prompt去分析所需要識別的檔案路徑,第二個提示詞才是我們所要問的問題。現在我們先嘗試用中文提示詞:
$ python3 -m nano_llm.chat --api=mlc \
--model Efficient-Large-Model/VILA1.5-3b \
--prompt '/data/images/path.jpg' \
--prompt '請問圖中提供什麼資訊?'
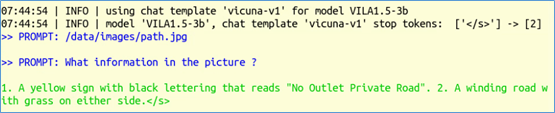
下面是 /data/images/path.jpg 的內容:

系統最終所提供的回應(不一定完全一樣):

這裡可以看出,在終端模式下顯示中文的能力不完整,因此會出現亂碼。其次系統會識別我們prompt的語種,並用相同語種來做回應,還挺智能的。
現在我們將第二個promt改成“What information in the picture ?”,跑出來的結果如下截屏,回答的非常正確:“1.黃色標誌,黑色字體,寫著“禁止出口私家路”。圖2:一條兩邊都是草的彎彎曲曲的路。”
如果我們要對影片進行分析的話,這裡的底層會用到專案作者早期的jetson-utils裡的videoSource與videoOutput兩組庫,輸入影片支持H264/H265編碼的MP4/MKV/AVI/FLV等格式,輸出部分還支持RTP/RTSP/WebRTC等網路影片協定,分別透過 --video-input 與 --video-output 兩個參數進行傳遞。
在nano_llm.vision.video、nano_llm.agents.video_query這些工具裡面,都調用了這些庫。
現在使用nano_llm.vision.video這個工具,簡單讀入影片並根據提示詞進行分析,再將分析結果嵌入影片中,然後輸出到指定影片中,我們就可以在輸出結果中查看結果。
請輸入以下指令試試看:
$ python3 -m nano_llm.vision.video \
--model Efficient-Large-Model/VILA1.5-3b \
--max-images 8 \
--max-new-tokens 48 \
--video-input /data/sample_720p.mp4 \
--video-output /data/sample_output.mp4 \
--prompt 'What changes occurred in the video?'
輸入的 /data/sample_720p.mp4 是一段在公路上拍攝的車流與行人影片,識別後的影片存放在 /data/sample_output.mp4。下圖是截取其中一張在影片上嵌入“提示詞回應”的截圖:

現在我們可以將 --video-input 參數指向 /dev/video0 去調用攝影機,但是輸出指向一個檔案時,由於應用的結束得用“Ctrl-C”去中斷,導致影片儲存不完整而無法打開,那我們就沒辦法去檢查執行的結果了。
推薦的辦法,就是查看攝影機結果時,將結果透過RTP協定輸出到指定電腦中,然後在電腦裡用 gst-launch 來接收結果。
現在我們在Jetson Orin的容器裡面執行以下指令:
$ python3 -m nano_llm.vision.video \
--model Efficient-Large-Model/VILA1.5-3b \
--max-images 8 \
--max-new-tokens 48 \
--video-input /dev/video0 \
--video-output rtp://<IP_OF_TARGET>:1234 \
--prompt 'What are in his hand?'
開始執行之後,在目標的Linux電腦上執行以下指令:
$ gst-launch-1.0 udpsrc port=1234 \
caps="application/x-rtp, media=(string)video, \
clock-rate=(int)90000, encoding-name=(string)H264, payload=(int)96" \
! rtph264depay ! decodebin ! videoconvert ! autovideosink
然後就會在Linux電腦上看到以下的顯示:
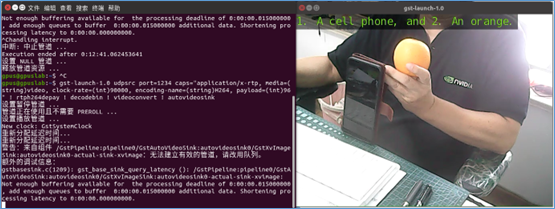
這樣就能解決在攝影機裡進行即時識別的問題。


 iThome鐵人賽
iThome鐵人賽