經過前五天的努力,我們已經成功打造出一個功能完整的互動式學習地圖平台了!
從第一天提出 GASO 的概念,到第二天決定使用 Graphviz 來繪製地圖,再到第三天建立 Google Sheets 作為資料後台,第四天調整出多種美觀的排版效果,最後第五天添加了節點點擊互動功能。
現在這個地圖已經可以點擊節點查看詳細資訊了,但還有一個重要的問題:
當使用者點擊一個節點時,如何清楚顯示到達該節點的學習路徑?
就像使用 GPS 導航時,系統會高亮顯示從起點到終點的路線一樣,我們的學習地圖也應該要能夠高亮顯示學習路徑,讓學習者清楚知道要達到目標需要經過哪些步驟。
所以今天,我們要讓學習路徑「亮」起來!就像這樣:
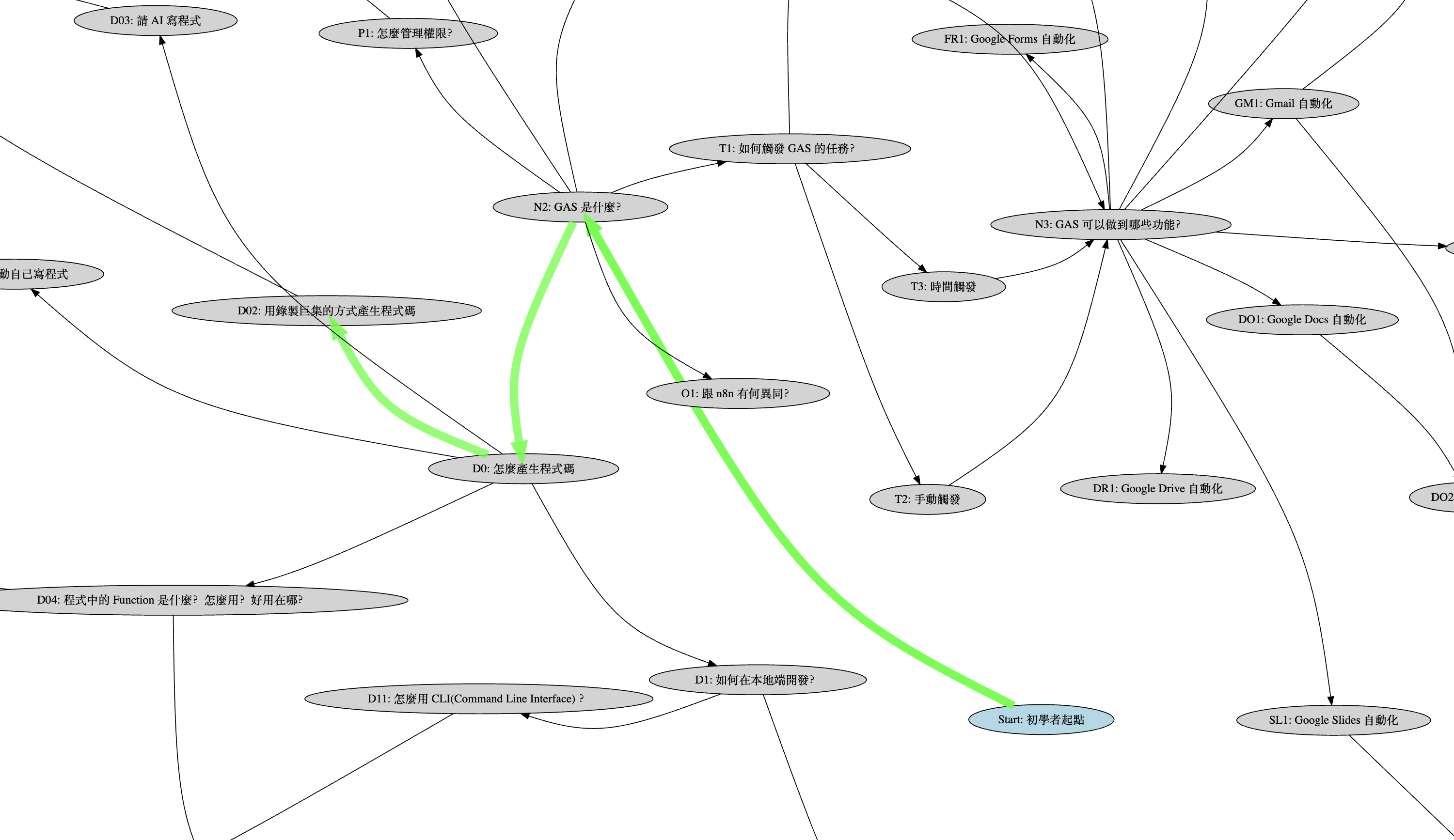
在我想像中的 GASO 平台,當使用者點擊任何一個節點時,系統應該要能夠:
這樣一來,學習者就能像看地圖一樣,一眼看出要達到目標需要經過哪些關卡,讓學習變得更有方向感。
在開始實作之前,我們先來了解一下什麼是鄰接表(Adjacency List)。
鄰接表是一種用來表示圖(Graph)的資料結構,它用一個陣列或物件來儲存圖中所有的節點,每個節點再連結一個列表,記錄與該節點相鄰的所有節點。
舉個例子,假設我們有一個簡單的學習地圖:
用鄰接表表示就會是:
{
A: [B, C],
B: [D],
C: [D],
D: []
}
這樣我們就可以快速查詢任何節點可以到達哪些其他節點。比如要查詢節點 A 可以到達哪些節點,只需要查看 adjacencyList['A'],就能得到 [B, C]。
在我們的 GASO 專案中,鄰接表是這樣建立的:
// 建立鄰接表用於路徑查找
// 鄰接表是一種圖的資料結構,用來記錄每個節點與哪些節點相連
const adjacencyList = {};
// 初始化鄰接表
// 為每個節點建立一個空陣列,用來存放與它相連的節點
nodes.forEach(([id]) => {
if (id) {
adjacencyList[id] = []; // 每個節點對應一個空陣列
}
});
// 建立鄰接關係
// 根據邊的資料,將相連的節點加入到彼此的鄰接表中
edges.forEach(([src, tgt]) => {
if (src && tgt) {
// 如果來源節點還沒有鄰接表,先建立一個
if (!adjacencyList[src]) {
adjacencyList[src] = [];
}
// 將目標節點加入到來源節點的鄰接表中
adjacencyList[src].push(tgt);
}
});
鄰接表是一個物件,其中每個鍵是節點 ID,值是一個陣列,包含該節點可以直接到達的所有節點。
在學習地圖中,起點是那些沒有入邊(也就是沒有上游、只有下游)的節點,也就是學習者開始學習的地方。在我們的實作中,系統會自動找出所有沒有入邊的節點作為起點:
/**
* 找出學習路徑圖中的起始節點
* 起始節點是指沒有其他節點指向它的節點,即沒有入邊的節點
* @returns {Array} 起始節點陣列
*/
function findStartNodes() {
// 取得所有節點(從鄰接表的鍵值中取得)
const allNodes = new Set(Object.keys(state.adjacencyList));
// 用來記錄哪些節點有入邊(被其他節點指向)
const hasIncoming = new Set();
// 遍歷鄰接表,找出所有有入邊的節點
Object.entries(state.adjacencyList).forEach(([source, neighbors]) => {
// 對於每個源節點,檢查它指向的所有鄰居節點
neighbors.forEach(neighbor => {
// 將被指向的節點標記為有入邊
hasIncoming.add(neighbor);
});
});
// 起始節點是沒有入邊的節點(即沒有被其他節點指向的節點)
const startNodes = Array.from(allNodes).filter(node => !hasIncoming.has(node));
return startNodes;
}
我們使用廣度優先搜尋(BFS)來找到從起點到目標節點的所有可能路徑:
在學習路徑規劃中,選擇BFS有以下幾個重要原因:
保證最短路徑優先:BFS會先探索距離起點較近的節點,這意味著我們會優先找到最短的學習路徑。對於學習者來說,最短的路徑通常代表最直接的學習順序。
避免無限循環:在圖形結構中,如果存在循環路徑,BFS的層級探索特性可以幫助我們避免在同一個節點上無限循環,確保演算法的終止性。
找到所有可能路徑:與深度優先搜尋(DFS)不同,BFS可以系統性地探索所有可能的路徑,不會遺漏任何一條從起點到終點的路徑。
記憶體使用可控:雖然BFS需要儲存所有待探索的路徑,但在學習地圖的規模下,這個記憶體開銷是可接受的,而且比DFS的遞迴調用堆疊更可預測。
適合學習路徑的特性:學習路徑通常具有層級結構(基礎→進階),BFS的層級探索方式正好符合這種結構特性。
function findAllPaths(start, target) {
const allPaths = [];
const queue = [[start]]; // 佇列中儲存路徑
while (queue.length > 0) {
const path = queue.shift();
const current = path[path.length - 1];
if (current === target) {
// 找到目標節點,記錄這條路徑
allPaths.push([...path]);
continue;
}
const neighbors = state.adjacencyList[current] || [];
for (const neighbor of neighbors) {
// 避免循環路徑(同一個節點在路徑中出現多次)
if (!path.includes(neighbor)) {
const newPath = [...path, neighbor];
queue.push(newPath);
}
}
}
return allPaths;
}
這個演算法會找到所有從起點到目標節點的路徑,並且避免循環路徑。
現在我們需要將這些功能整合到現有的系統中:
/**
* 找到到達指定節點的所有路徑
* @param {string} targetNodeId - 目標節點ID
* @returns {Array} 所有可能的路徑陣列
*/
function findPathToNode(targetNodeId) {
const startNodes = findStartNodes();
const allPaths = [];
// 從每個起點開始尋找路徑
startNodes.forEach(startNode => {
const paths = findAllPaths(startNode, targetNodeId);
allPaths.push(...paths);
});
return allPaths;
}
透過今天的實作,我們成功建立了完整的路徑查找系統:
明天我們將繼續實作視覺化高亮功能,讓這些找到的路徑能夠以美觀的方式呈現在使用者面前。
我們明天見!
如果想要看一些我的鐵人賽花邊心得,
也歡迎追蹤我的 Threads 和 Facebook

