
利用指定的現成的高階手機,把它刷機,成為一體化模組的電腦視覺深度學習的行車電腦__Comma.ai/NEO
前面的篇幅有大略的提到,迄今網路上打造出基於視覺影像辨識路況的自動駕駛,幾個著名的Open Source專案,以及這幾個專案採用的auto-pilot技術方向和 deep learning深度學習資源的概觀,如何做到ADAS先進自動輔助駕駛的方法;
Comma.ai公司提交開源是其中之一,
去年12月1日喬治霍茲把它一手研究的自動駕駛DIY套件提交發佈Opensoure Project之後,網路新聞媒體充斥著這則新聞題材,台灣也是每家新舊媒體都洗版,但全都是文科生的媒體文,QQ
現在的電信公司0元手機一隻內建的運算力,強過上個世紀NASA歷屆阿波羅登月計劃控制中心全體大型電腦的運算能力,0元手機內建相機和即時處理性能,也強過踏上月球表面太空人和登月車的攝影機;
更不用說採用高通晶片驍龍處理器( Qualcomm Snapdragon )、競相PK地表最強運算能力的高階Android手機了
這個專案採用的手機是照片這隻「One Plus 3」,刷機改安裝第三方ROM,稱為NEOS的精簡型Linux作業系統,成為運行影像視覺辨識、深度學習辨識道路程式、位置控制命令運算的整合式自動駕駛開放運算平台。
(如下方照片影片)
One Plus 3它的規格類似台灣於2016年下發行的 ASUS Zenfone 3 Deluxe 6G/64G(ZS570KL)價錢也不相上下!
和被Tesla以及前文提到的Udacity自動駕駛學程所採用的Nvidia DRIVE PX2主機板起跳美金15000相比,
這是700美金零頭價錢的窮人版入門方案,自然也不能要求太多十八般武藝囉!
不過目前 NEOS這個ROM package是特定用在One Plus 3開發的,其他手機尚未支援,是令人掙扎的地方!
(編輯中......)
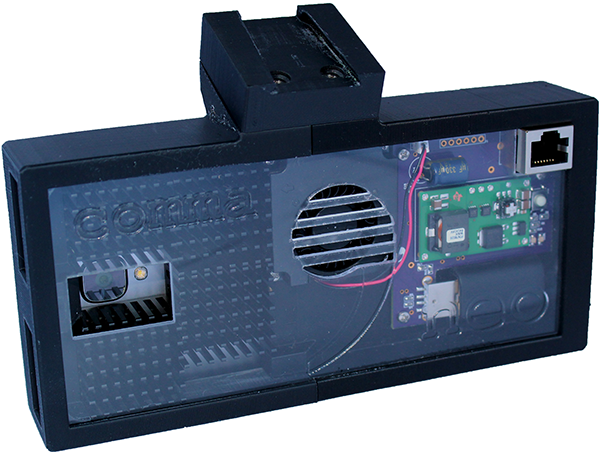
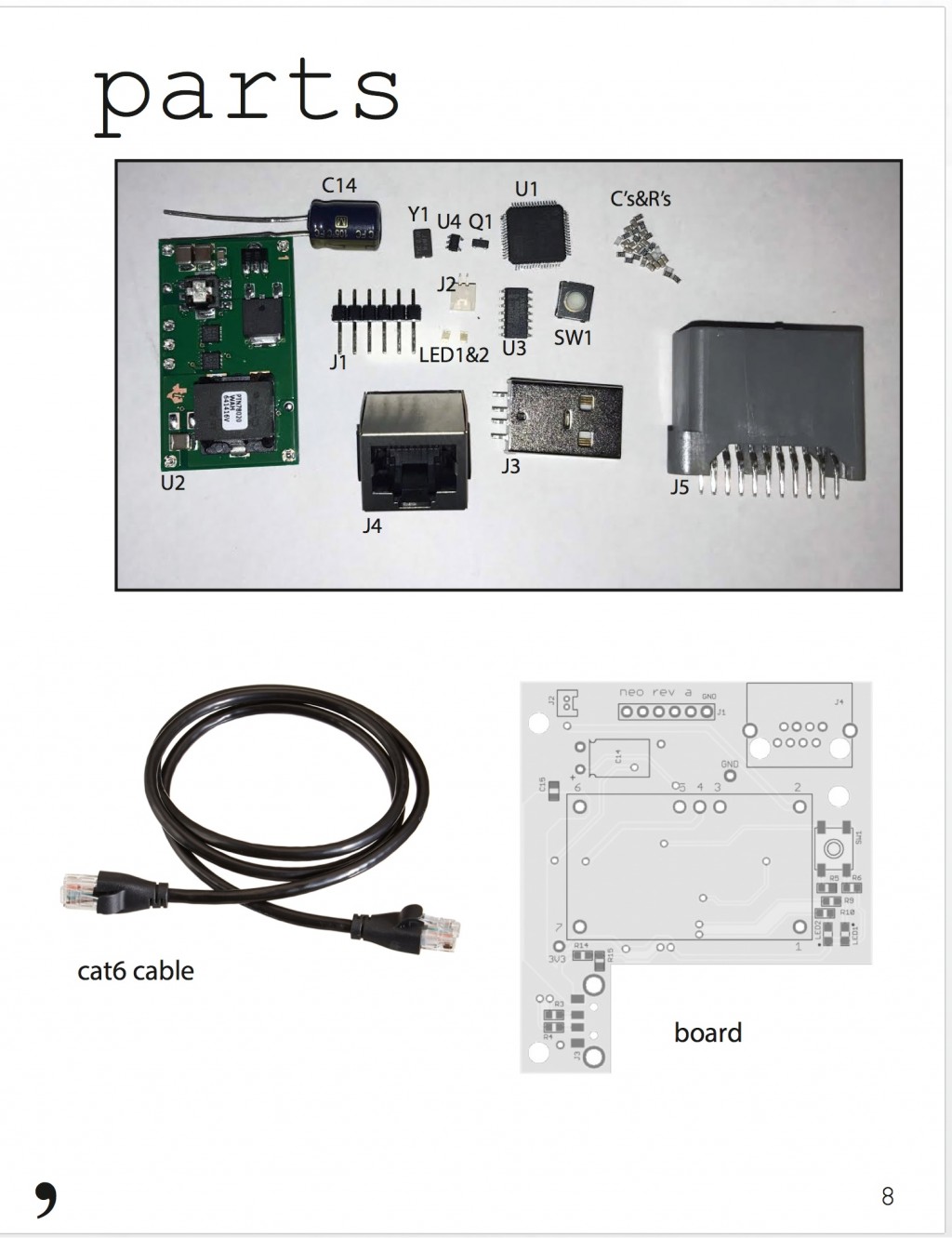
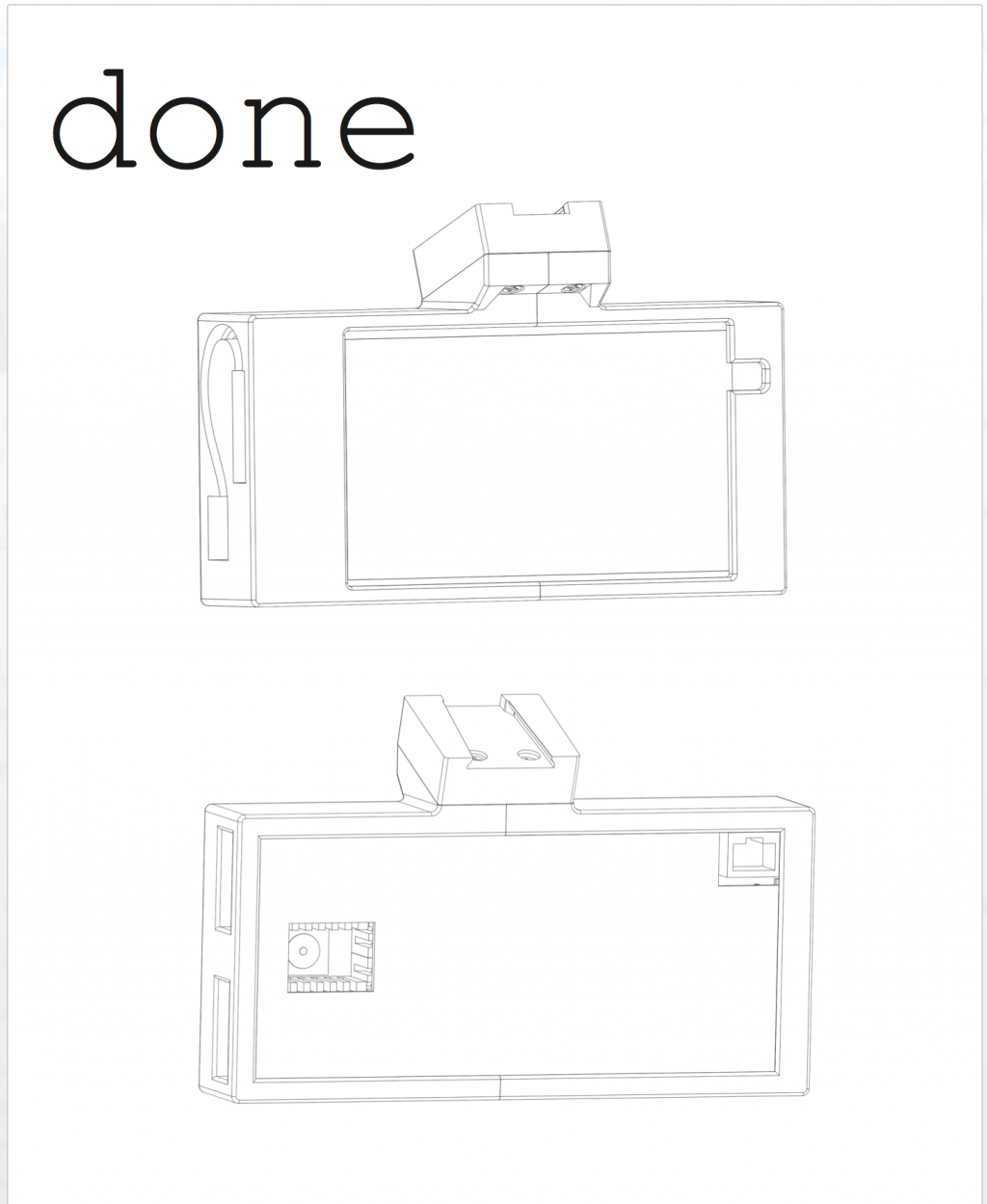
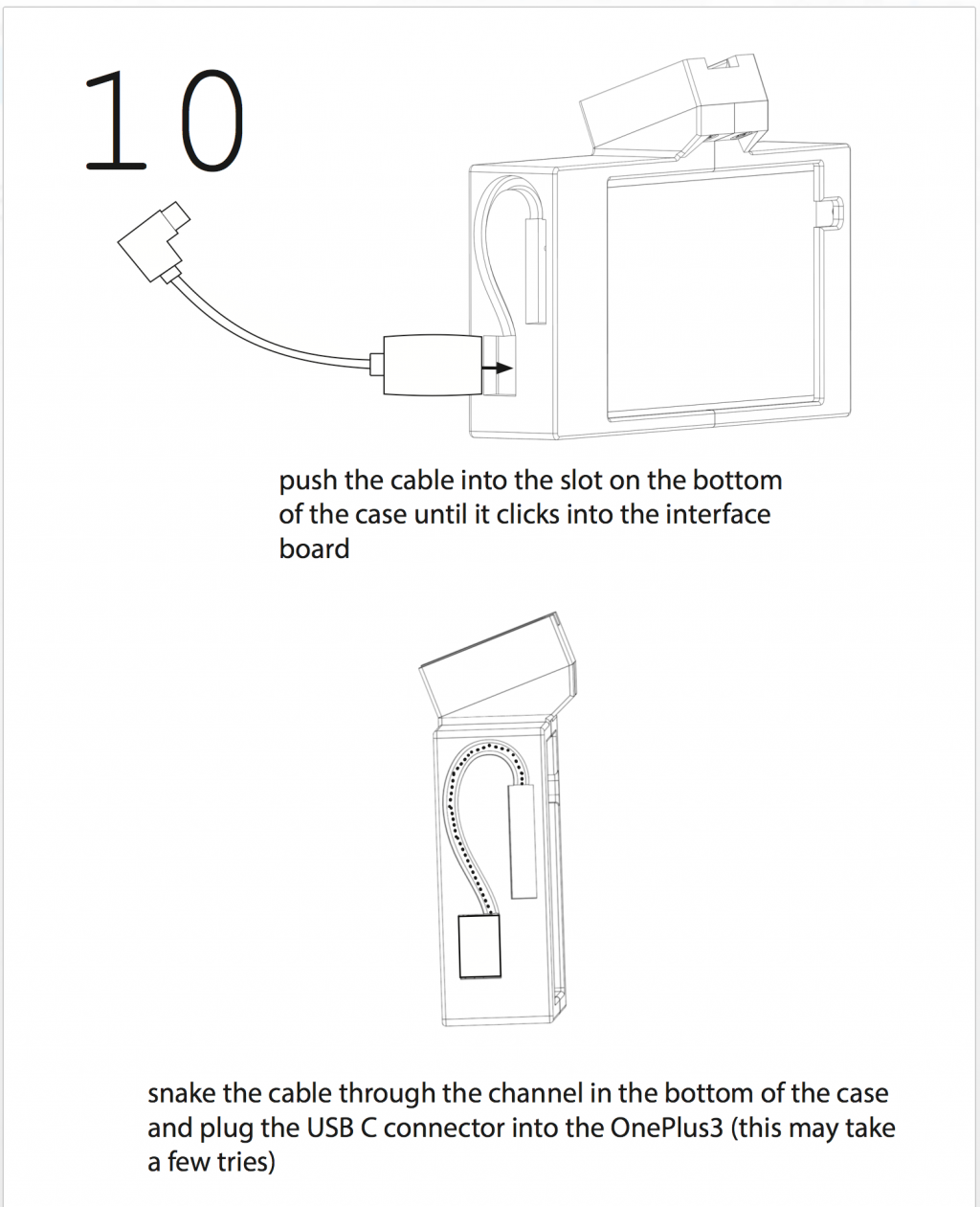
「One Plus 3」+「OTG連接線」+「CAN code轉換電路板模組」+「ODB2接頭CAN bus連接線 」+「3D列印外殼」,這5項硬體部件結合成一個稱為「Comma NEO」的外掛式自動輔助駕駛電腦。
(以下圖片、影片來源:Comma.ai公司發佈內容,及創辦人喬治.霍茲自製的輔助駕駛套件,提交open source的成品長相和完整的製作說明書 )
3D列印的殼子裡鎖上的那一小片綠綠的電路板,就是「CAN code轉換電路板模組」,負責擔任手機和車體之間,處理CANbus控制信號的接收(sniffer)、剖析與轉譯.
那個小方孔後方的鏡頭,就是手機機背的主相機鏡頭,持續拍攝「前方街景」

手機內建相機向前,拍攝即時「街景」,即時利用深度學習而學會的判斷,以及從手機OTG界面接上轉接線,介入車身的轉向控制,拉動方向機轉向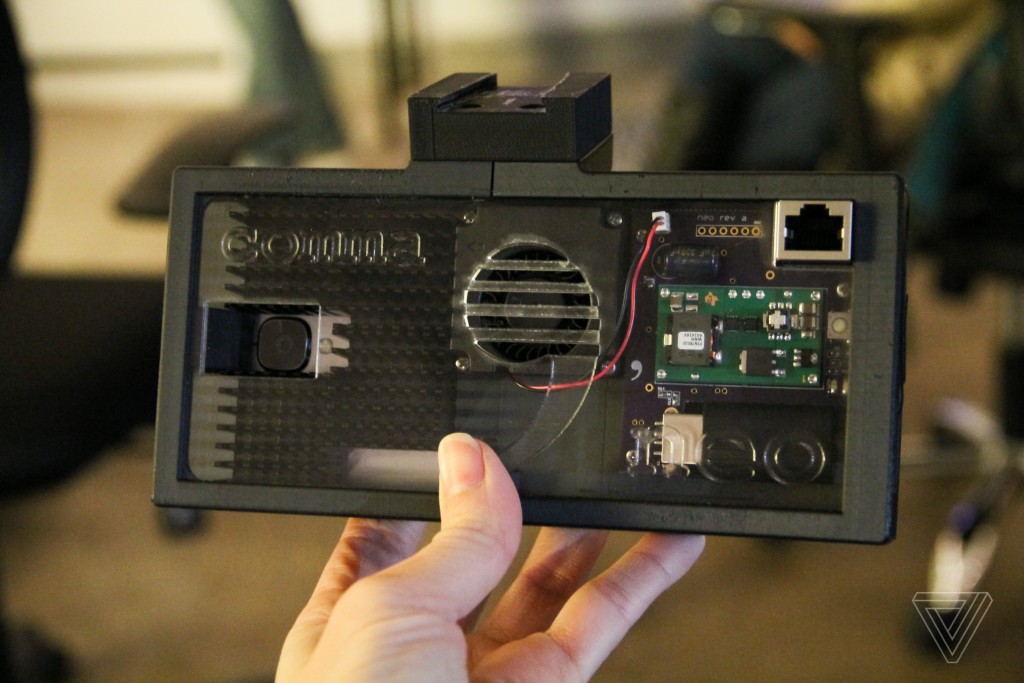
照片:



還特別設計為手機加貼散熱片,因為持續運作相機原本就是高負載運算,現在還同時多工處理,即時處理影片識別車道,與加速度的監測與補償修正計算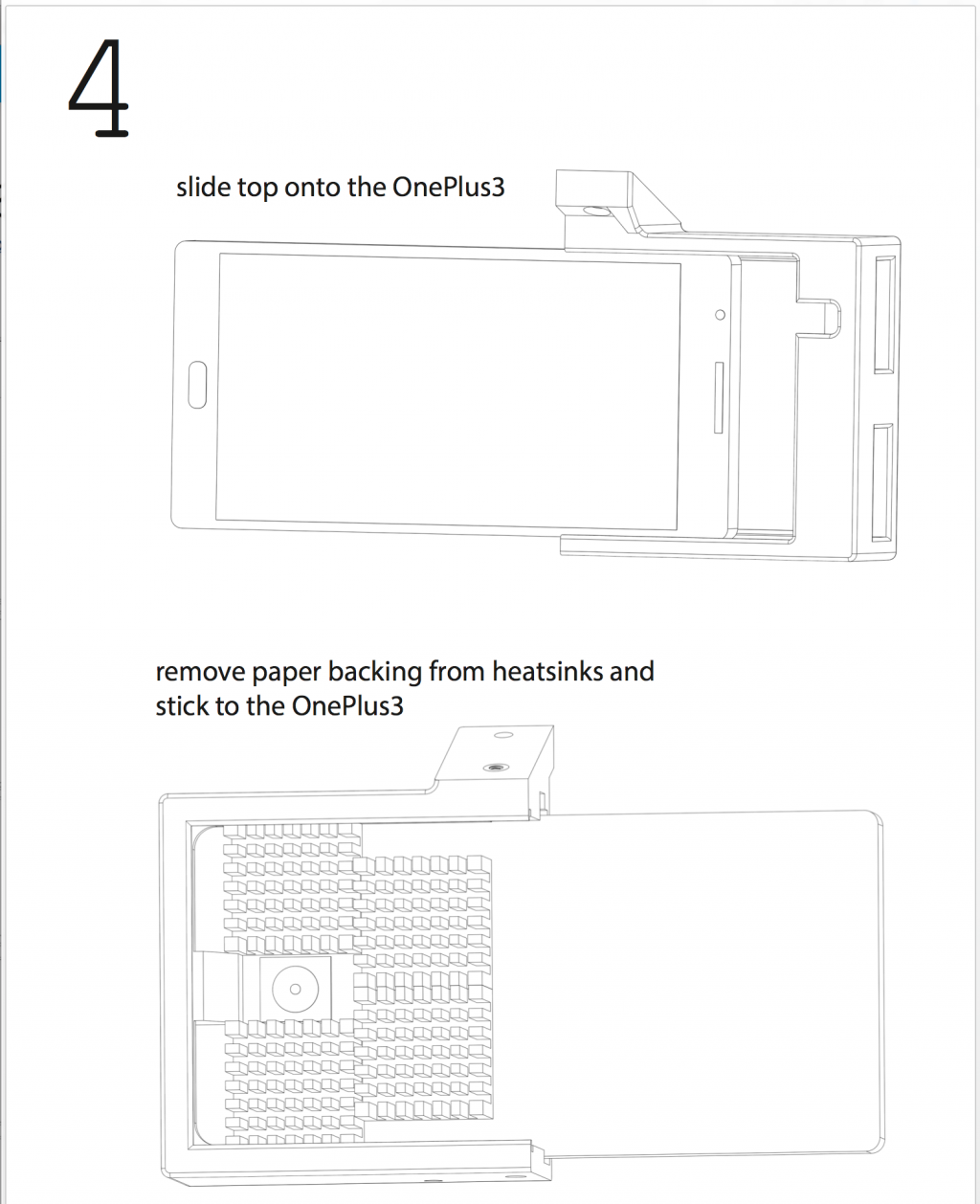
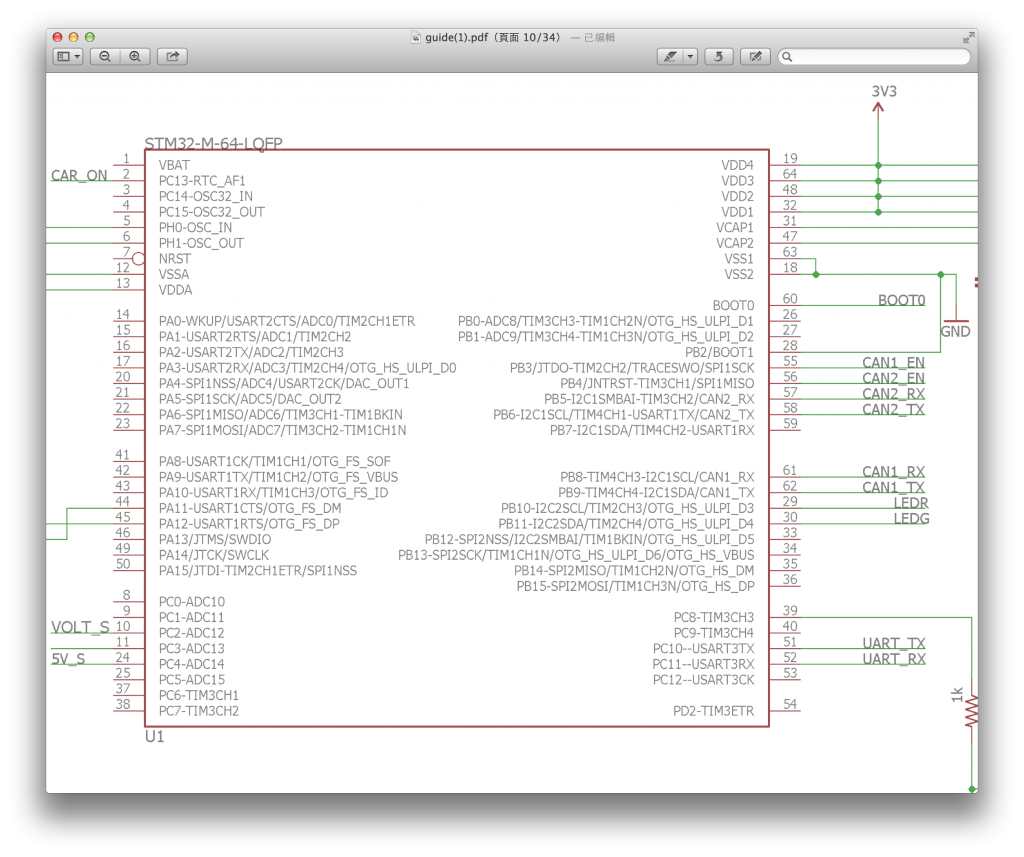
其中綠綠或藍藍的那一小塊「CAN code轉換電路板模組」是利用意法半導體的STM32-M64晶片,作為主要的CAN bus信號解析與轉換,
同時因為「Comma NEO」是opensouce code的Linux系統,所以透過這塊信號轉換模組,「Comma NEO」也成為一台開源的車輛CAN bus信號分析儀
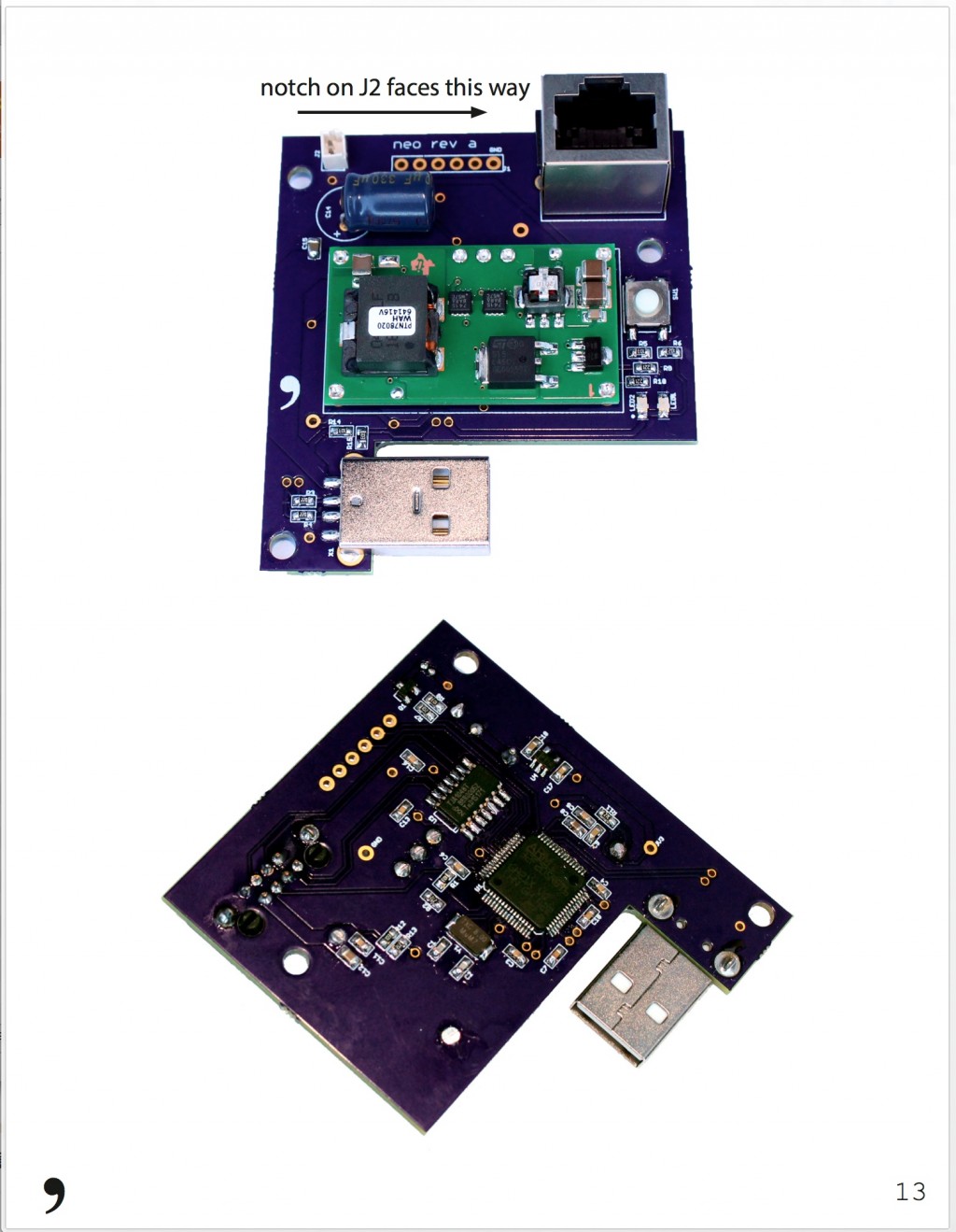
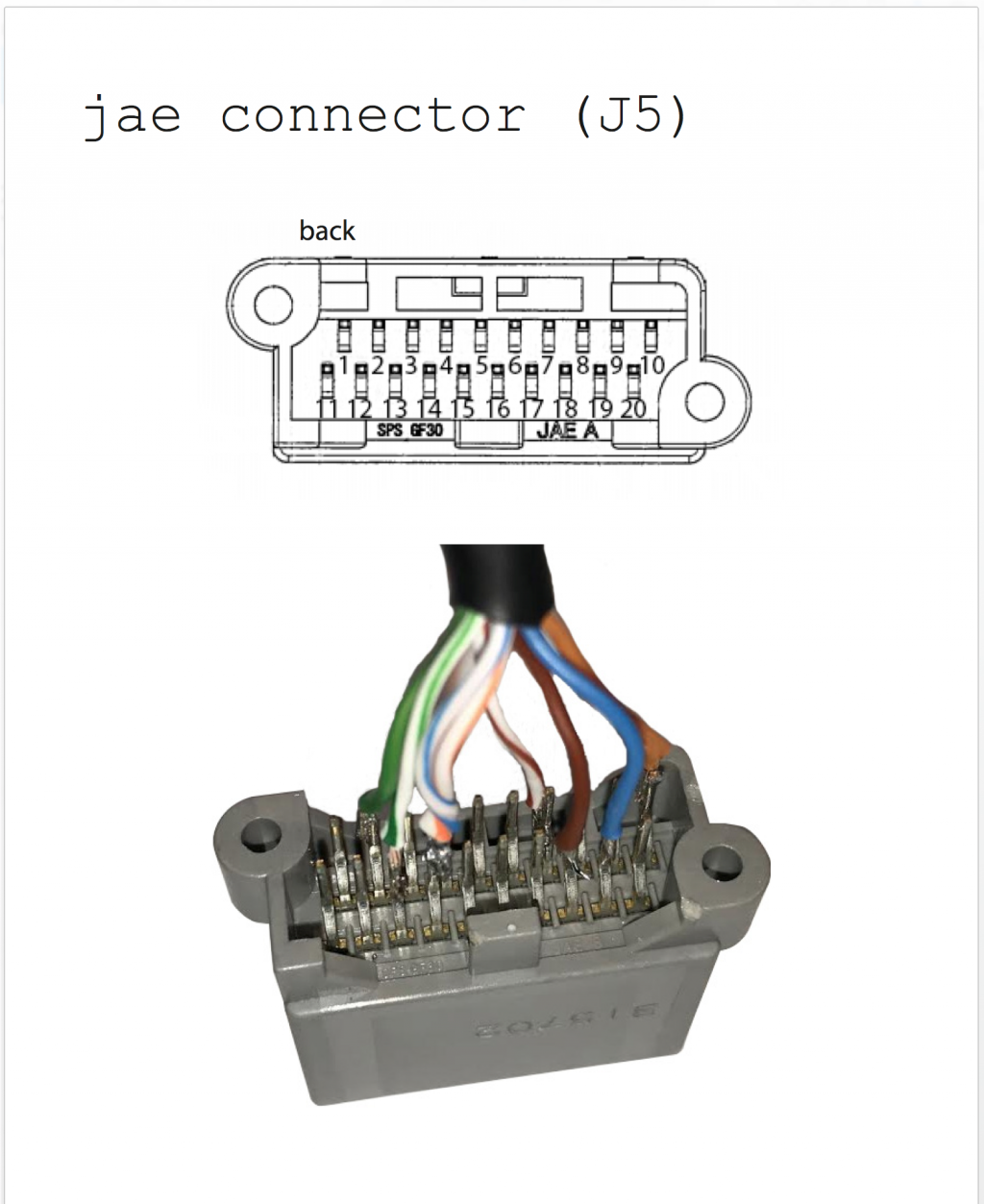
(圖片來源:Comma.ai公司創辦人喬治.霍茲自製的輔助駕駛套件,提交open source的成品長相和完整的製作說明書 )
參考資源:
comma.ai發佈「comma NEO」在Github的 原始文件資料:https://github.com/commaai/neo
comma.ai的Twitter: https://twitter.com/comma_ai

