ROS不是傳統的操作系統,如Windows,Linux,Android,是基於作業系統的操作系統(應用系統)
ROS是基於Ubuntu下可使用,進程管理系統、文件系統、用戶介面、程序實用程序(編譯器、執行序模型等)
中間件(middleware):可以在不同硬體之間的數據傳輸/接收、調度和錯誤處理
What is Ubuntu? Ubuntu is a popular Linux distribution.
Ubuntu comes with more than 1,000 pieces of software.Linux kernel
Desktop environmentStandard desktop applications( word processing, a web browser, spreadsheets, a web server, programming languages, integrated development environment(IDE), PC games).
Ubuntu 由Canonical 公司所維護,修改並發行。
預設以GNOME桌面環境為基礎,並且將常用的開放源碼軟體包裝其中,而且經由Canonical公司團隊的用心開發,除了整體畫面設計美觀一致,軟體維護也十分迅速且札實。
特色
Chapter 1 ROS初體驗
電腦技術,感測器技術,電子技術等新技術發展的推動下,機器人進入了迅猛發展的黃金時期。
機器人技術正從傳統工業製造領域轉入於
What is ROS?
Robotic Operating System(ROS),機器人操作系統。
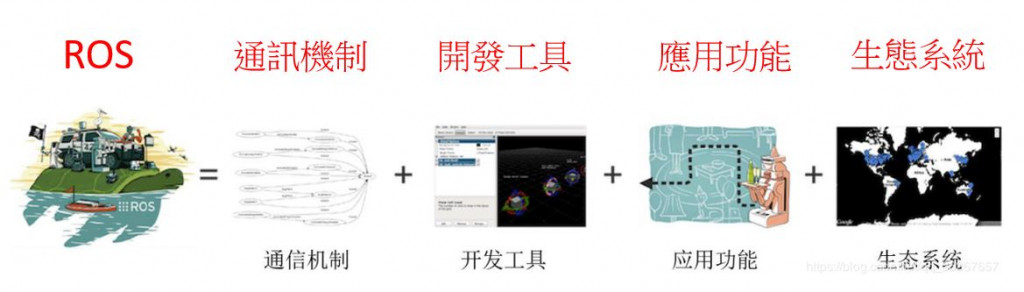
ROS 是一個用於編寫機器人軟體的靈活、彈性框架。集成了大量的工具、套件庫、通訊協議。
提供了類似操作系統所提供的功能:
ROS 的設計目標
設計目標: 提高機器人研發中的軟體重複使用率。
設計成為一種分布式結構,使得框架中的每個功能模組都可以單獨被設計、編譯。
ROS主要為機器人開發提供硬體抽象、底層驅動、消息傳遞、程序管理、應用原型等功能和機制。
同時整合了第三方工具和library。
可快速完成機器人應用的建立、編寫和多機整合。
Package and meta package,可以在社群中共享和分發
ROS的特點
ROS的核心----分布式網絡
使用的基於TCP/IP的通訊方式,實現了模組間點對點的coupling,可以執行若干種類型的通訊。
基於主題(Topic)的異步數據流通訊。
基於服務(Service)的同步數據流通訊。
以及,參數服務器上的數據存儲等。
(1)點對點的設計
(2)多語言支持
(3)架構精簡,集成度高
(4)組件化工具包豐富
(5)免費且開放源
明天會再針對ROS於Ubuntu environment的安裝及設定


 iThome鐵人賽
iThome鐵人賽