在網路上面google距離感測
會發現有很多方式的模組可供選擇
有簡單的超音波 也有紅外線 甚至是雷射的
超音波的原理就是打聲音出去,聽看看多久時間會回來
以此計算距離
這邊就先介紹HC-SR04
一邊是T (Transmitter)發射端,會發出40KHz的聲波
另一邊是R (Receiver)接收端,是接收發出去的聲波
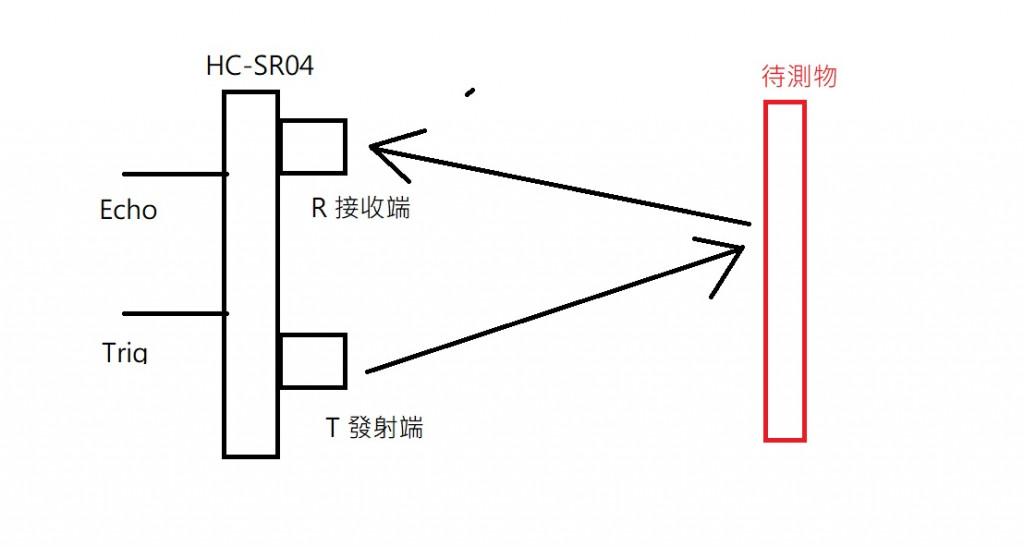
這個超音波的模組偵測的距離最近可以2cm
最遠可以到400 cm
在以前學到的知識裡面
音速是34300cm/s
所以計算距離的話
就是在(打出去的時間與接收的時間差 /2 ) 再乘以34300 就是距離了
可是剛剛343m/s是在溫度20度C的條件下
如果精算溫度進去
聲速=331+0.6T (每升高一度C增加0.6)
這樣的計算不知道會不會更準確
此外
還有紅外線與雷射的方式來測距離
都可以透過IIC或是UART的方式來取得
不過我看到有文章提到特斯拉認為
將眾多的感測器整合起來,可能會有很多困擾
不如專注在視覺上的測距
所以應該也有用影像來判斷距離的
這個就要找找相關文件(也許還不是那麼容易找的)

