話說受到火雞姐的鼓舞(其實是逃命),我來到了中國廚藝學院(其實是少林寺的伙房)拜師學藝,沒想到得罪了方丈和十八銅人,根本就離開不了這個如地獄般的地方。直到有一天我傷心到一夜白髮,唱出了雞姐最愛的「情和義值千金,上刀山下地獄去有何憾!」才得到大師的首肯,讓我參加食神大賽。當我和唐牛正面對決「佛跳牆」時,他還不服的說我抄襲,還好評審主持公道說:「比賽是這樣啦!就好像游泳跑步一般,不就是你做什麼他也做什麼,有啥好抗議呀?抗議無效!」。沒想到最後佛跳牆還被搞到爆炸,害我只好使出少林絕學「火雲掌」做出那碗看似簡單但吃了令人落淚的「黯然銷魂飯」才結束這一回合。
相信跟了28天的伙伴們,學了一大堆招式卻不知如何施展,內心一定很煩燥,想著到底這麼陽春的開發板、這麼少的算力和這麼簡單的模型到底能做出什麼有趣的AI應用。各位有福了,今(2021)年tinyML基金會和Hackster.io及多家贊助廠商(還包含台灣奇景光電和原相科技)一同舉辦「Eyes on Edge: tinyML Vision Challenge!」,如圖Fig. 29-1所示。
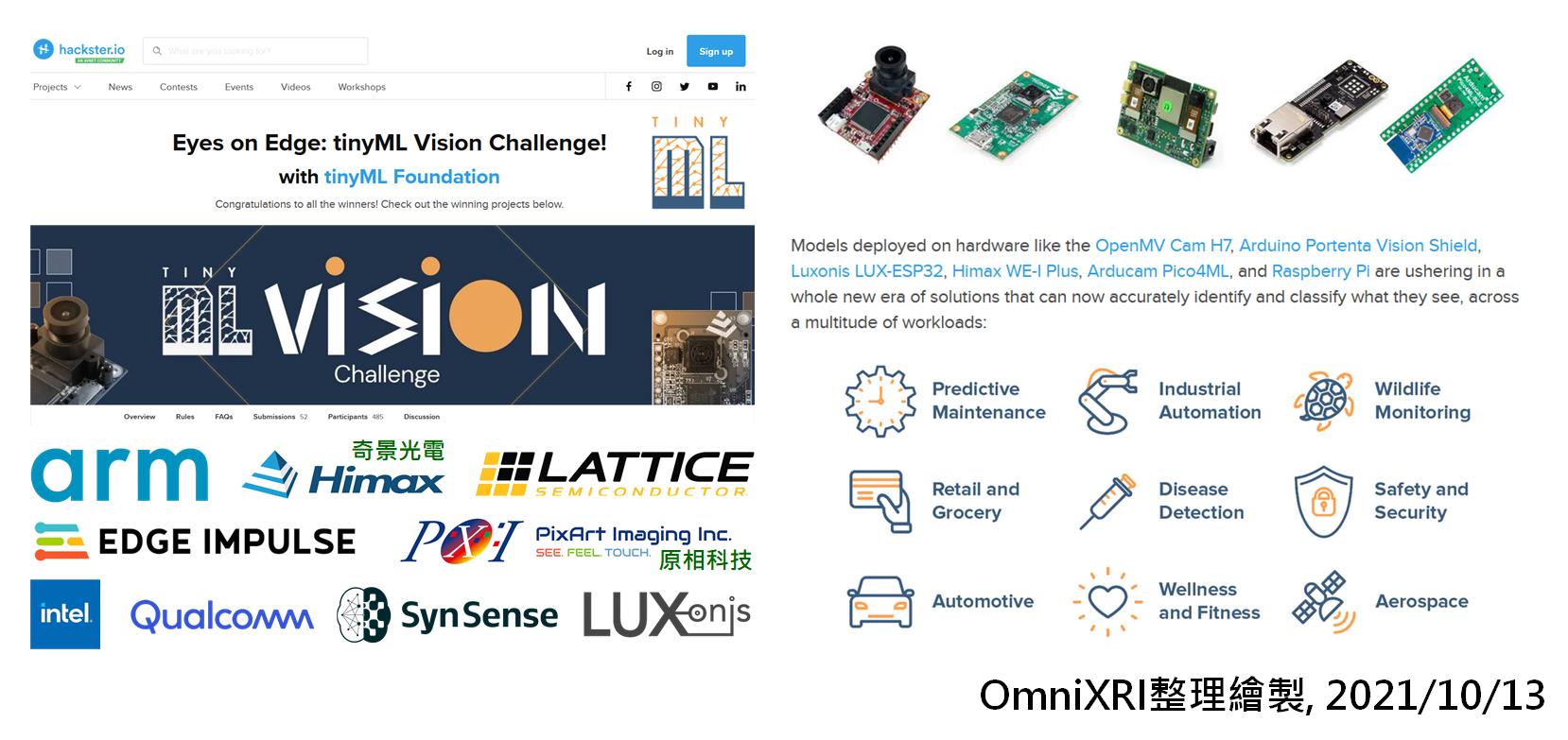
Fig. 29-1 Eyes on Edge: tinyML Vision Challenge。(OmniXRI整理繪製, 2021/10/13)
這場比賽從今(2021)年4月開始,一直到9月結束,10/5才公佈得獎名單,還熱騰騰地。接下來就各位簡單介紹一下這六個精彩的作品,如圖Fig. 29-2所示,希望讓大家從模仿自學作起(別人做什麼,我也做什麼),當搞清楚這些門道後,就能獨立創作出屬於個人風格的作品(黯然瀨尿牛丸麵?)。完整作品說明,包括使用情境、相關領域知識理論、硬體零件、電路連接、工作源碼(Github)等,可參考每個作品簡介的「原文出處」連結。

Fig. 29-2 tinyML Vision Challenge 2021得獎作品。(OmniXRI整理繪製, 2021/10/13)
「空中森林火災偵測」,主要用到Arduino Nano 33 BLE Sense、ArduCam 2640攝影機模組及GPS相關元件,搭配「The Flame Dataset」公開資料集,通常這類應用多半時搭配紅外線(溫度感測)攝影機,但其重量會嚴重影響空拍機飛行時間,所以改用一般攝影機模組可以大幅簡輕重量,同時搭配間歇性取樣分析(每拍一次休息500ms)可更節省空拍機的電力耗損。他們使用了小型CNN模型,訓練了100次得到了96%的精確度,同時也確保能佈署到BLE Sense開發板中。最後再搭配GPS衛星導航路線巡檢,就能更確保森林火災發生時能即早被通知及撲滅,以免造成更大的傷亡及財產損失。
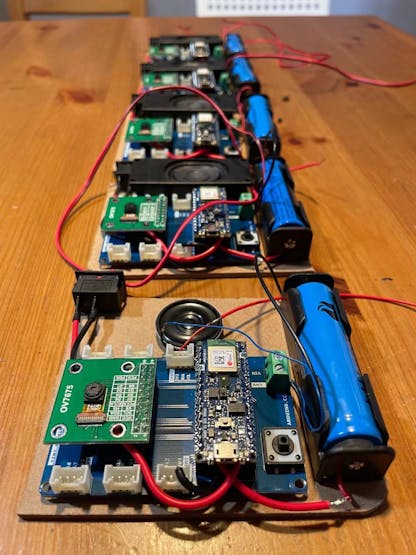
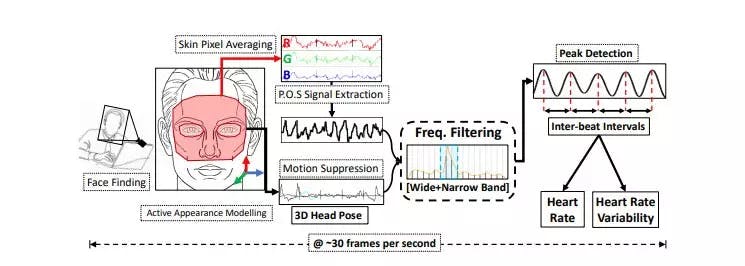
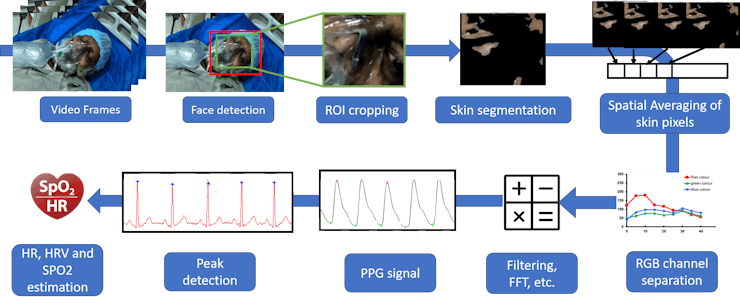
「WorkSafe:基於電腦視覺的多參數監控和診斷」,主要用到樂鑫的ESP32 Cam及Node MCU、HC-SR04超音波測距模組及MLX90614紅外線(體溫)感測器,該團隊參考「Non-Contact Physiological Parameters Extraction Using Facial Video Considering Illumination, Motion, Movement and Vibration」論文從遠程光體積描記(r-PPG)方法來估測HR(心率)、SPO2(飽和氧)和 CBT(核心體溫),即以非接觸的方式,用紅外線反射及面部皮膚顏色變化來量測患者的重要生理資訊。由於紅外線測溫模型極容易受距離影響,所以這裡使用超音波測距方式來校正,該團隊相關研究也在IEEE Xplore發表「Enhanced Pyrometric device with Long Range for mass screening based on MLX90614」。該系統經實測已接近傳統接觸式儀器,有機會發展成較為平價且普及的設備。
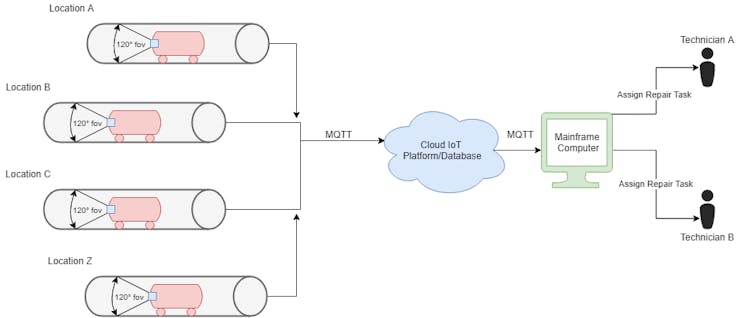
「TinySewer - 低功耗下水道故障檢測系統」,主要使用Arduino Portenta H7及Protenta Vision shield搭配Edge Impulse一起開發。藉由這個作品可搭載於小車上,取代工作人員在下水道中移動,利用視覺記錄影像同時辨識主要缺陷,包括裂縫(斷裂、塌陷)、根部侵入、阻塞(障礙物)、位移,透過移動的時間線,還可推算出大概的位置,方便檢修。透過Edge Impulse的遷移學習建立模型,使用MobileNetV2 96x96 Dropout 0.35,學習率為 0.35,最後一層有 40 個神經元。經過50個訓練週期後可得94%的精確度。最後生成OpenMV格式的標籤檔、模型檔及Python腳本檔,並修改部份內容後燒錄回Arduino Portenta中。
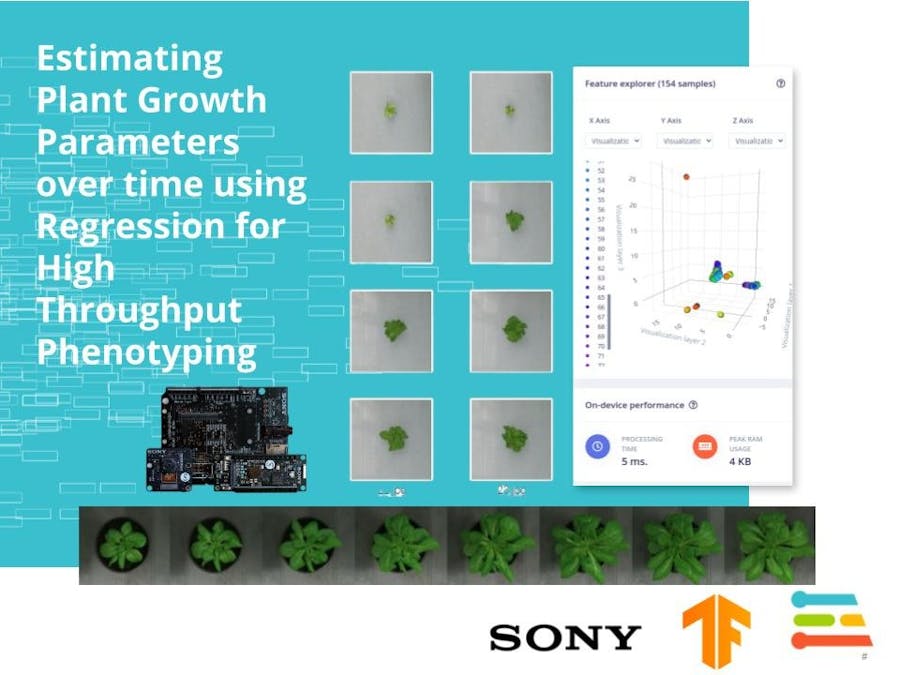
「高吞吐量表型的植物生長估計」,主要使用SONY Spresense及配套攝影機模組,搭配Edge Impulse進行開發,利用影像來觀察植物葉子的外觀變化(表型)來推估植物生長的狀況。這個作品使用了Growth monitoring of greenhouse lettuce文中提供的3種資料集,為了擴增資料集,還加入縮放、旋轉等處理,而在資料集的多樣性上也考慮了光照、亮度、飽和度、品種、拍攝角度及運動取像模糊度等問題。SONY Spresense開發板上自帶1536kB RAM和 8192kB ROM (Flash),所以可以容納較大的模型,較適合影像類的tinyML應用。在模型選用部份CNN架構,兩組卷積池化層,分別使用32和16個特徵圖,最後展平及搭配0.25隨機丟棄(dropout)得到輸出結果。經過訓練兩種不同模型,第一種通過植物分割計算的實際葉面積指數(LAI)作為標籤。第二個模型包括對應於植物生長階段的Day-wise標籤。最後得出合理的回歸值,
「使用機器視覺檢測爆胎」,主要使用OpenMV Cam H7(自帶攝影機模組),配合Edge Impulse進行開發。這個作品利用機器視覺來查看汽車輪胎是滿還是漏氣,可應用於地磅站、自駕車車隊及租車歸還。在資料集建構上分為三個類別包括正確充氣(約45 psi)、扁平輪胎(約10 psi)及非輪胎(或無輪胎),原始影像尺寸為240x240像素之灰階影像。每個類別約取300張,接著使用Edge Impulse遷移學習模型MobileNet V2 96x96 0.35進行訓練,最後得出不錯的精確率。未來可加入更多的壓力區間,做為分類依據,即有機會取代人力或專業儀器量測。
「智能餵鳥器」,主要使用Arduino Nano 33 BLE Sense及OV7675攝影機模組,搭配Edge Impulse進行開發。這個作品是一群小朋友完成的,主要是為了防止松鼠偷吃小鳥的食物,利用機器視覺來辨識是否為小鳥。這裡使用了2912張影像來訓練,而模型則採用Mobilenetv1_0.25_96修改後進行訓練。最後佈署到開發板後,如果偵側到松鼠還會發出噪音來嚇跑它們,反之是小鳥時就安靜。由於這項設備非常省電,所以只需簡單太陽能板就能供應足夠的電力。
看完這麼多有趣的作品,是否心動了呢?這些作品都附有完整源碼及製作說明,「照圖施工、保證成功」,如不成功,請直接在作品網頁上留言和原作者聊聊,或許還可多交個朋友。
參考連結
Hackster.io - Eyes on Edge: tinyML Vision Challenge!
ps. 為讓文章更活潑傳達硬梆梆的技術內容,所以引用了經典電影「食神」的橋段,希望小弟戲劇性的二創不會引起電影公司的不悅,在此對星爺及電影公司致上崇高的敬意,敬請見諒。





_i5hTuw9OtN.jpg?auto=compress%2Cformat&w=740&h=555&fit=max)
_xA29jFF2Xn.jpg?auto=compress%2Cformat&w=740&h=555&fit=max)
_y1hWcN8tRj.gif?auto=format%2Ccompress&gifq=35&w=900&h=675&fit=min&fm=mp4)
_ZUcOS2q4Pp.png?auto=compress%2Cformat&w=740&h=555&fit=max)