做機器視覺自動化的圖形識別之應用,通常會先用影響處理的技術從影像中擷取出有用的物件或特徵。
直接用物件的區塊內容做後續的辨識或分析的缺點就是難度很高且沒有效率。
所以我們會先用一些表示式來表示擷取的物件,以簡化工作量、提高工作效能,以數值來描述物件,最後再用圖形識別或電腦視覺模組作分析。
而這些有效率的物件或特徵的表達方式就是影像的 ** 表示 ** 與 ** 描述 **。
而今天主要要討論 ** 鏈碼(Chain code) **
簡單來說,鏈碼是沿著物體的邊界行進,並記下行進的方向。
而有兩種不同的鏈碼表示式:
4-連通方向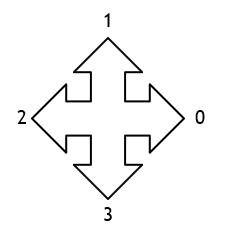
及
8-連通方向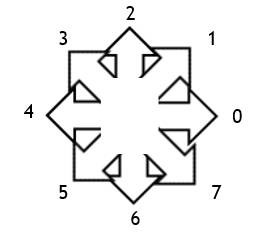
稍微簡單介紹一下鏈碼的演算法
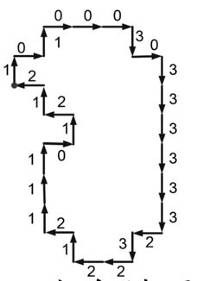
而有了鏈碼表示式後,可以記錄起始點座標值及一連串的方向碼當做鏈碼的描述式。
圖片之四方向鏈碼描述式為:
1010003033333323221211101212
明天來小小的實做一下!

