在上一篇文章中,我們介紹了 Zenoh 的資料交換基礎。今天,我們將焦點轉向 網路層面 —— 特別是 節點發現 (discovery) 的運作方式,以及 Zenoh Router 如何開啟全新的可能性。
Zenoh 可運行於任何網路拓撲,無論是 Broker 模式、Routed 模式,或是 Peer-to-Peer 模式,都能靈活支援。
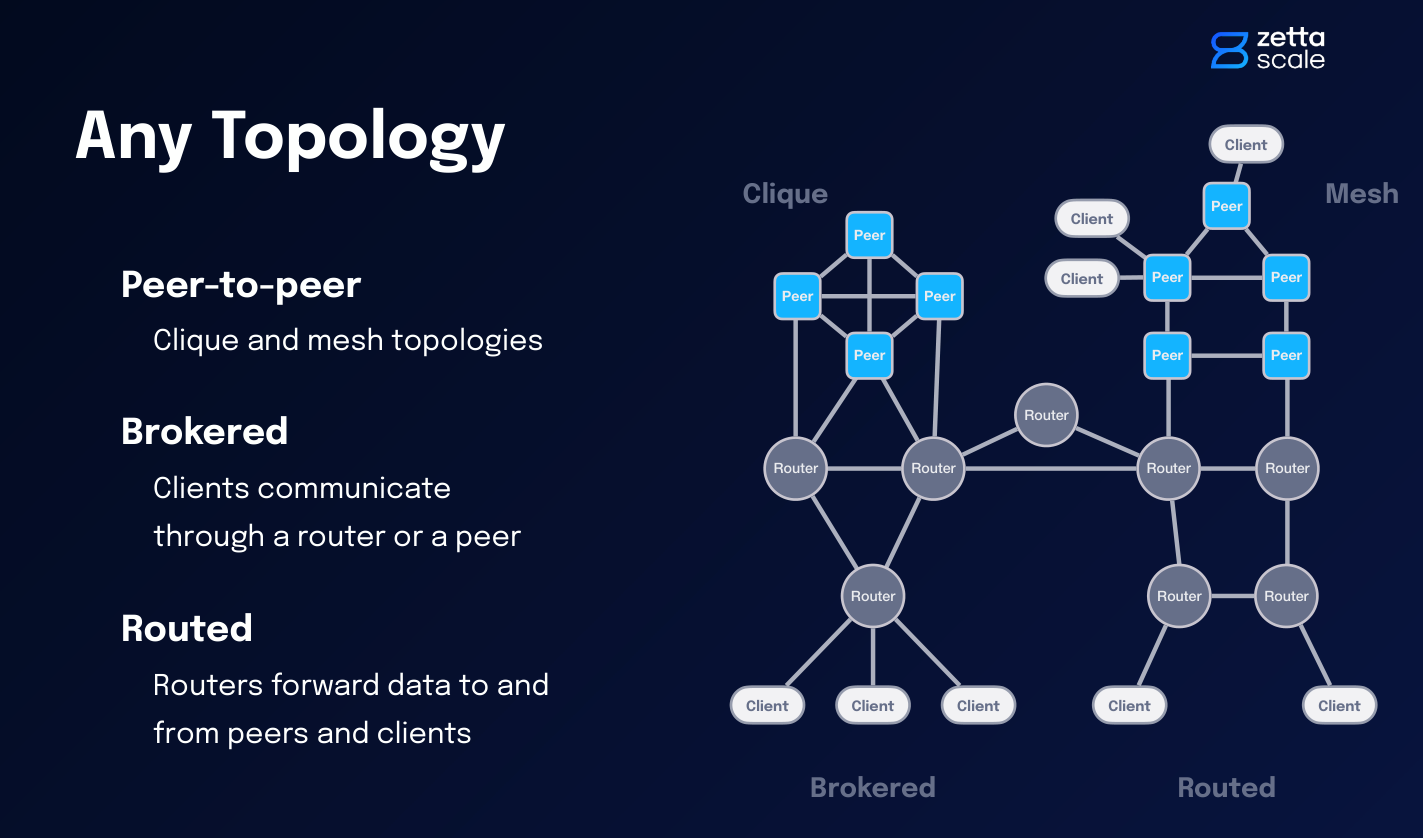
在 對等模式 (peer mode) 下使用 Zenoh,並啟用 multicast discovery(預設啟用),節點能夠自動互相發現。這與 MQTT 完全不同,因為 MQTT 的所有客戶端都必須透過一個 broker 連線。
點對點 (P2P) 網路在 區域網路 (LAN) 中表現不錯,但跨越網際網路時就會遇到限制。而這正是 DDS 的痛點之一。
更糟的是,DDS 因其協定設計,會出現所謂的 discovery storm。根據 這篇文章,DDS 的 discovery 流量會隨著節點、讀取端與寫入端的數量,呈現 平方級數增長。
ROS2 採用 DDS 作為底層通訊。DDS 的 discovery 機制主要依賴兩個協定:
最終結果是:在一個系統中,若有 n 個 participants,每個有 r 個 readers 和 w 個 writers,則 discovery 流量會隨以下公式增長:
n * (n-1) * (r + w)
這種平方級增長不只是理論問題,而是真實的網路負擔:
ROS2 開發者嘗試過如 ROS2 Discovery Service 等方式來緩解,但這些方案只能減輕壓力,無法解決根本問題。
Zenoh 在設計時就考慮到了這些限制。它不會廣播所有 publishers/subscribers 的細節,而是僅交換 資源需求 (resource interests)。
主要改進包括:
/mybot/**。因此,Zenoh 的 discovery 流量在系統擴張時依然 可預測且穩定。
為驗證這些概念,進行了實地測試:
比較三種情境:
| 測試場景 | 封包數 | 平均大小 (B) | 總傳輸量 (Bytes) | 相對 DDS 減少率 |
|---|---|---|---|---|
| DDS | 686 | 366.73 | 251,576 | – |
| Zenoh | 31 | 213.45 | 6,617 | 97.37% |
| Zenoh + RG | 13 | 136.54 | 1,775 | 99.29% |
| Zenoh + WS | 17 | 276.41 | 4,699 | 98.13% |
| Zenoh + RG + WS | 1 | 82 | 82 | 99.97% |
結論:搭配 資源泛化 與 Warm Start,Zenoh 幾乎徹底消除了 discovery storm,將 DDS 的開銷降低 高達 99.97%。
雖然點對點模式適合本地環境,但在更大型的機器人與分散式系統中,常需要 擴展性、跨協定橋接與資料儲存。這正是 Zenoh Router (zenohd) 的用途。
它相當於一個資料樞紐,可以在不同網路間路由資料,甚至作為多種協定的橋接器。
先下載原始碼並編譯:
git clone https://github.com/eclipse-zenoh/zenoh.git
cd zenoh
cargo build --all-targets
啟動 router:
./target/debug/zenohd
此時,一個 Zenoh router 已在本地運行。
Zenoh Router 的威力在於 插件系統。透過插件,Zenoh 能與 ROS、DDS、MQTT,甚至 Web 完整互通。
zenoh-plugin-ros2dds
橋接 ROS2/DDS 流量,大幅降低 discovery 開銷,並支援跨 WAN 傳輸。
zenoh-plugin-dds
橋接標準 DDS 系統(基於cyclors, Cyclone 的低階 Rust API)。適合混合式 DDS + Zenoh 環境。
zenoh-plugin-mqtt
與 MQTT broker 或 client 互通,讓 ROS 或 DDS 資料能流向雲端 IoT 平台。
zenoh-plugin-webserver
以 HTTP REST 方式存取 Zenoh 資源,可透過 curl 直接操作。
zenoh-plugin-ros1
橋接 ROS1 topic,支援 ROS1 + ROS2 + Zenoh-native 混合部署。
Zenoh 的優勢之一,就是能在同一個 router 中 同時運行多個插件:
ROS2 在 WiFi 上的 discovery 減輕
使用 zenoh-plugin-ros2dds,可減少超過 99% DDS discovery 封包。
ROS2 + MQTT 雲端儀表板
ROS2 → ros2dds → Zenoh → mqtt → 雲端平台 (Grafana/Node-RED)。
ROS1 + ROS2 互通
同時啟用 ros1 與 ros2dds 插件,即可透明轉換,不必額外 ROS bridge 節點。
DDS + Web 應用整合
DDS ↔ dds ↔ Zenoh ↔ webserver ↔ HTTP,用 curl 直接讀取工控系統資料。
全能整合樞紐
一個 Zenoh router 可同時:
Zenoh 將所有這些協定,統一在同一個 資料經緯 (data fabric)。
Router 亦可用來保存資料。以下為記憶體儲存範例:
./target/debug/zenohd --cfg='plugins/storage_manager/storages/demo:{key_expr:"demo/example/**",volume:"memory"}'
互動方式:
./target/debug/examples/z_put
./target/debug/examples/z_get
或透過 HTTP:
curl -X PUT -d '"Hello World!"' http://localhost:8000/demo/example/test
curl http://localhost:8000/demo/example/test
借助 Zenoh Router能獲得一個 高效能、避免 discovery storm、跨協定整合 的資料骨幹,無論是機器人、IoT 還是分散式系統皆適用。
使用 Zenoh P2P 模式,你能自動發現並高效進行本地通訊。
搭配 Zenoh Router,則進一步擴展:
最重要的是:再也沒有 discovery storm。
Zenoh 提供的彈性,讓你能從一群透過 WiFi 溝通的機器人,平順擴展到雲端應用,而不再受 DDS 的高開銷或 MQTT 的 broker 限制。


 iThome鐵人賽
iThome鐵人賽