Hand-Eye Calibration(手眼校準)是機器人視覺領域的一項基礎且關鍵的技術。
簡單來說,它的目的就是要確定機器人手臂(手)上的座標系和視覺傳感器(眼,通常是相機)上的座標系之間的精確空間轉換關係,不過這個適用於類似Universal Robot及工業機器人手臂的視覺校準,如果是TM的手臂,就可以省去這一段。
在機器人系統中,為了讓機器人能根據視覺感測器(相機)「看到」的資訊來執行精準的動作(例如抓取、焊接、組裝等),我們必須知道兩個重要的座標系是如何對齊的:
機器人座標系:描述機器人手臂末端執行器(End-effector)的位置和姿態。
相機座標系:描述相機所觀察到的物體在影像中的位置。
手眼校準就是透過一系列的數學運算和實驗步驟,求出一個轉換矩陣(通常表示為旋轉矩陣 R 和平移向量 t),這個矩陣可以將相機看到的物體位置(在相機座標系下)精準地轉換到機器人可以理解和到達的位置(在機器人基座或末端座標系下),其數學模型通常表示為著名的矩陣方程式 AX=XB 或 AX=ZB,其中 X 就是我們要求的相機與機器人之間的轉換關係。
這個過程類似於人類從小學習手眼協調,讓眼睛看到的目標能被手精準地觸摸到,簡單的來說就是運動學座標轉換。
根據相機安裝的位置,Hand-Eye Calibration主要分為兩種形式:
眼在手 (Eye-in-Hand)
架構:相機固定安裝在機器人手臂的末端執行器上,與手臂一起移動。
目的:校準相機座標系到機器人末端執行器座標系之間的轉換關係。
應用:適用於需要近距離觀察、追蹤或在複雜環境中導航的任務,例如引導螺絲鎖附、近距離檢測等。
眼在外 (Eye-to-Hand)
架構:相機固定安裝在機器人工作環境中的外部(例如固定在工作檯上方或側面),相機位置不隨機器人手臂移動。
目的:校準相機座標系到機器人基座(Base)座標系之間的轉換關係。
應用:適用於需要大範圍監控或引導機器人將物體從固定位置抓取的任務,例如流水線上的物體定位抓取、貨物搬運等。
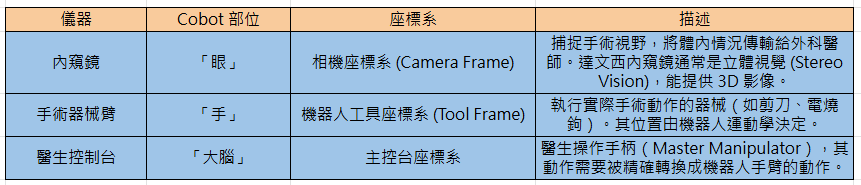
舉個醫療機器人的手術導航系統的例子
達文西手術系統(da Vinci Surgical System)
是經典的「眼在手」(Eye-in-Hand)架構
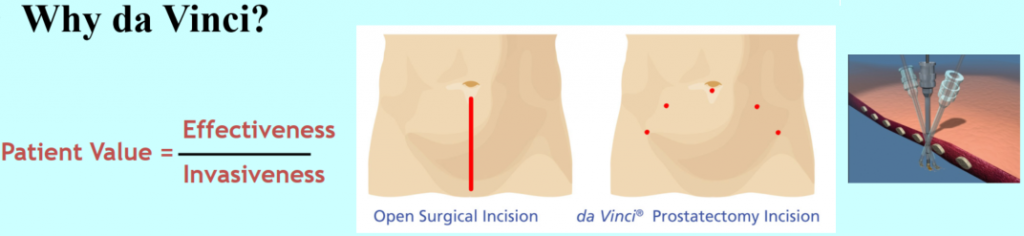
此系統已在各大醫院使用,如果愛美又不想傷口太大,可以自費使用達文西手術,就是比較貴啦(大概比一般手術貴4倍的價格),若是財力沒有問題,又有醫療需求,可建議自費,畢竟一個熟練的能操作達文西手術系統的醫生,要培養很多年,是值得的。
Reference: IEEE RAS


 iThome鐵人賽
iThome鐵人賽