在之前解的題目中我們可以看到leetcode輸入已經給建好的圖,但這些二維陣列有些像是Leetcode 695只要上下左右做BFS、DFS到最右下角就好,有些是像Leetcode 797陣列的列是目前節點,欄是與目前節點相連的節點,所以今天來理解建圖。
像Leetcode 695或是Leetcode 1091輸入的二維陣列就是一張代表相對位的地圖,並用0、1代表該位置屬性。
像Leetcode 797,我們列是目前節點,欄是目前節點能通往的節點。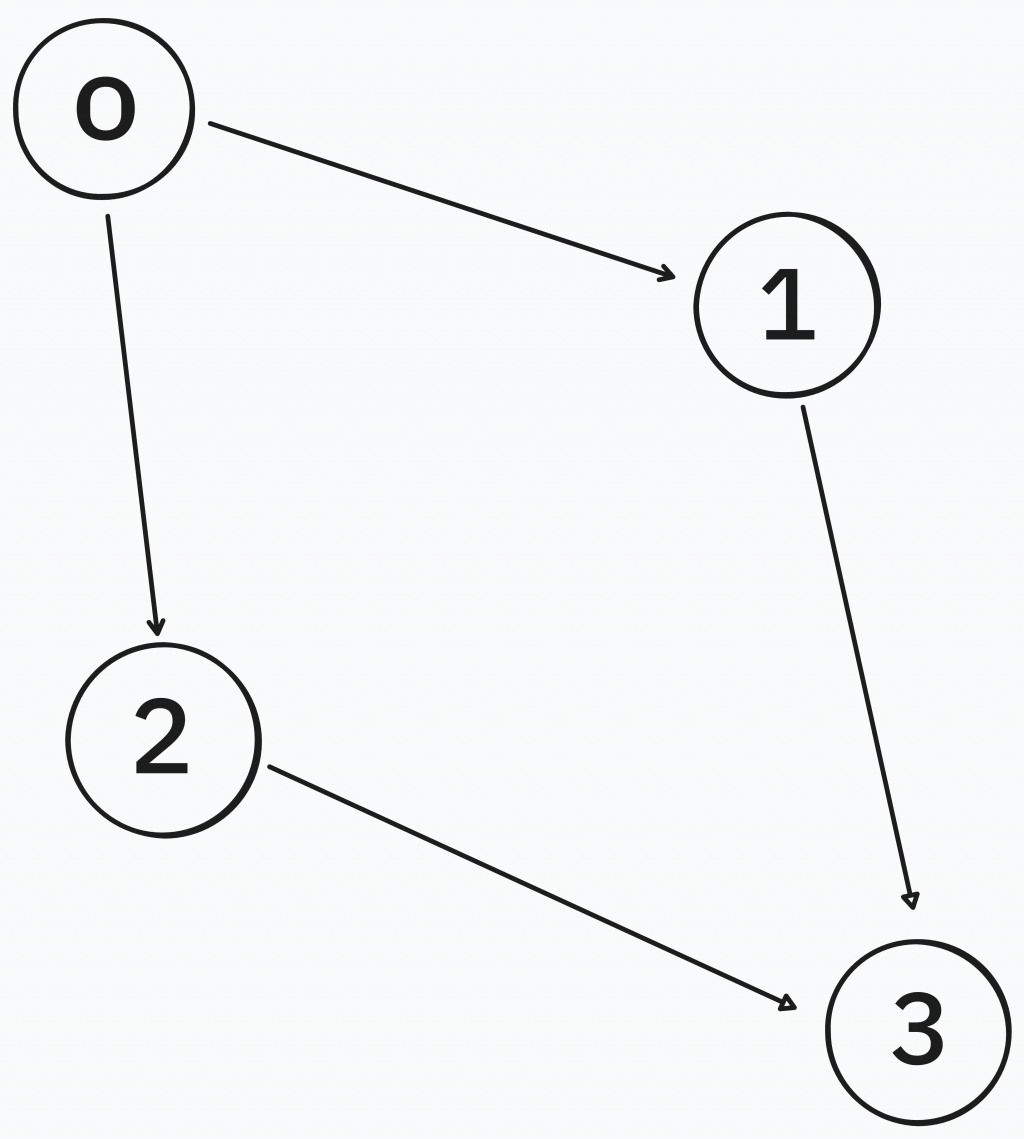
如果要用鄰接串列建上圖,key目前節點,value存目前可以走的點,(0,1)如果是有向代表節點0走到節點1
fn build_graph_directed(n: usize, edges: &[(usize, usize)]) -> Vec<Vec<usize>> {
let mut g = vec![vec![]; n];
for &(u, v) in edges {
g[u].push(v);
}
g
}
fn main() {
let n = 4;
let edges = vec![(0, 1), (0, 2), (1, 3), (2,3)];
let g = build_graph_directed(n, &edges);
println!("{:?}", g);
}
// [
//[1, 2], //節點0 可到 1 2
//[3], //節點1 可到 3
//[3], //節點2 可到 3
//[] //節點3 沒路了
//]
如上面有向建法但注意(0,1)有邊代表節點1也能走到節點0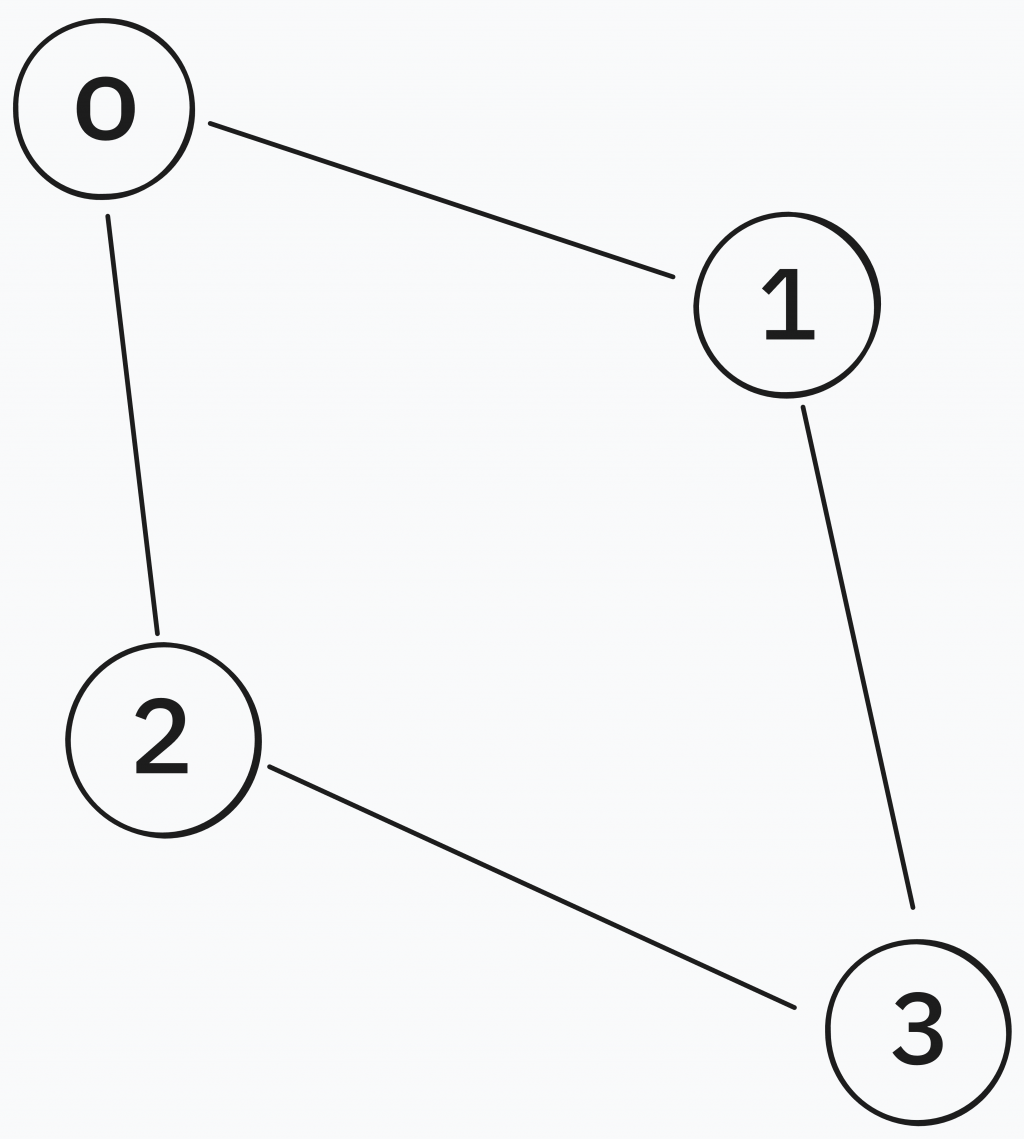
fn build_graph_undirected(n: usize, edges: &[(usize, usize)]) -> Vec<Vec<usize>> {
let mut g = vec![vec![]; n];
for &(u, v) in edges {
g[u].push(v);
g[v].push(u);
}
g
}
fn main() {
let n = 4;
let edges = vec![(0, 1), (0, 2), (1, 3), (2,3)];
let g = build_graph_undirected(n, &edges);
println!("{:?}", g);
}
//[
//[1, 2], //節點0 可到 1 2
//[0, 3], //節點1 可到 0 3
//[0, 3], //節點2 可到 0 3
//[1, 2] //節點3 可到 1 2
//]
鄰接串列只記錄有連到的節點,鄰接矩陣把全部是否有邊到記錄下來。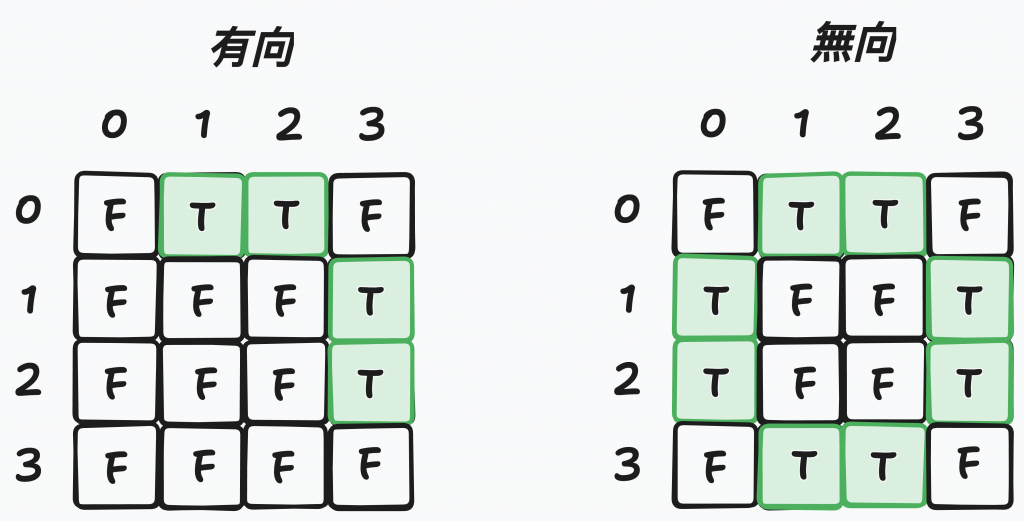
fn build_matrix(n: usize, edges: &[(usize, usize)]) -> Vec<Vec<bool>> {
let mut m = vec![vec![false; n]; n];
for &(u, v) in edges {
m[u][v] = true;
// 無向:
// m[v][u] = true;
}
m
}
fn main() {
let n = 4;
let edges = vec![(0, 1), (0, 2), (1, 3), (2,3)];
let g = build_matrix(n, &edges);
println!("{:?}", g);
}
| Adjacency List | Adjacency Matrix | |
|---|---|---|
| 空間複雜度 | O(V + E) | O(V²) |
| 遍歷某節點的鄰居 | O(節點存相鄰舉陣大小) | O(V) |
| 查詢某兩點是否相鄰 | O(節點存相鄰舉陣大小) | O(1) |
| 適合的圖 | 稀疏圖(Sparse) | 稠密圖(Dense) |
照慣例我們刷個一題來練習
題目:給一組兩兩相鄰的節點,判斷source和destination節點是否有相連
輸入:n = 3, edges = [[0,1],[1,2],[2,0]], source = 0, destination = 2
輸出:true
解法:只要把給的節點建好圖,就能用BFS遍歷判斷是否有路能通
Adjacency List建圖解法
use std::collections::{VecDeque,HashSet};
impl Solution {
pub fn valid_path(n: i32, edges: Vec<Vec<i32>>, source: i32, destination: i32) -> bool {
let mut adjance_list=vec![vec![];n as usize];
for edge in edges {
adjance_list[edge[0] as usize].push(edge[1]);
adjance_list[edge[1] as usize].push(edge[0]);
}
let mut deque=VecDeque::new();
let mut set=HashSet::new();
deque.push_back(source);
while let Some(c_n) = deque.pop_front() {
if c_n==destination {
return true
}
for &m in &adjance_list[c_n as usize] {
if(set.contains(&m)){
continue
}
deque.push_back(m);
set.insert(m);
}
}
return false
}
}
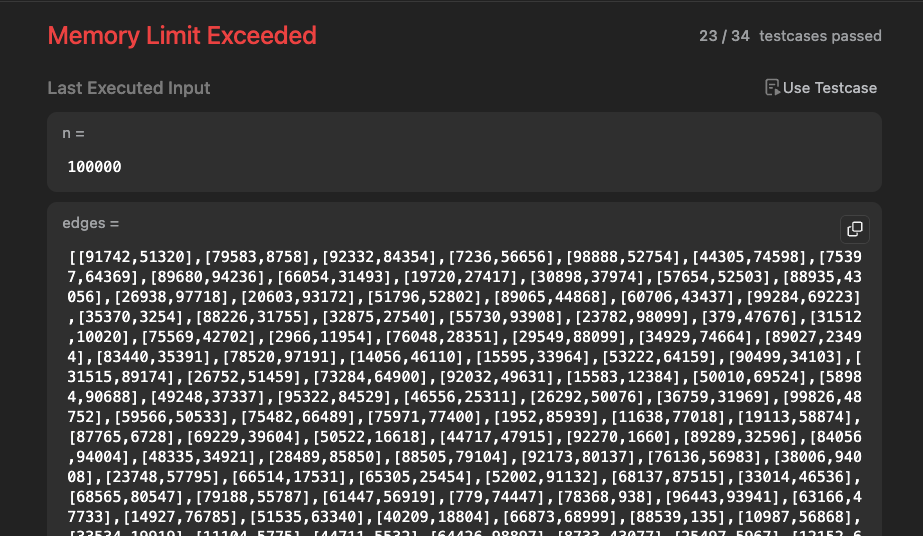
Adjacency Matrix建圖解法
當n=100000時Memory Limit Exceeded
use std::collections::{VecDeque,HashSet};
impl Solution {
pub fn valid_path(n: i32, edges: Vec<Vec<i32>>, source: i32, destination: i32) -> bool {
let mut adjance_matrix=vec![vec![false;n as usize];n as usize];
for edge in edges {
adjance_matrix[edge[0] as usize][edge[1] as usize]=true;
adjance_matrix[edge[1] as usize][edge[0] as usize]=true;
}
let mut deque=VecDeque::new();
let mut set=HashSet::new();
deque.push_back(source);
while let Some(c_n) = deque.pop_front() {
if c_n==destination {
return true
}
for i in 0..n as usize{
if adjance_matrix[c_n as usize][i] {
if(set.contains(&(i as i32))){
continue
}
deque.push_back(i as i32);
set.insert(i as i32);
}
}
}
return false
}
}
稀疏圖 (Sparse Graph):
邊數 E 遠小於 V²。
典型情況:E ≈ V 或 E ≈ V log V。
一個點平均只跟「少數」點相連。
稠密圖 (Dense Graph):
邊數 E 接近 V²。
典型情況:E ≈ V²。
幾乎每對點之間都有邊。

