這邊教學會確保 Leader 最終可以操作 Follower,然後才會進入到採樣與訓練的章節
電源線跟 USB 要確保正常接上,然後注意 SO-101 的 Leader 與 Follower 電壓是不一樣的,裝錯會 GG … 是不會燒壞掉,但程式會卡住就是。還好像是電壓不符合規範 log 都寫得很明顯,如果是不是不白得用到一半就要重新校正,這種就毫無頭緒可言。

但筆者發生過一次,變壓器壞掉的時候。還多買一組變壓器測試才發現這個問題…
只能說電機、軟體整合的世界,無奇不有 XD
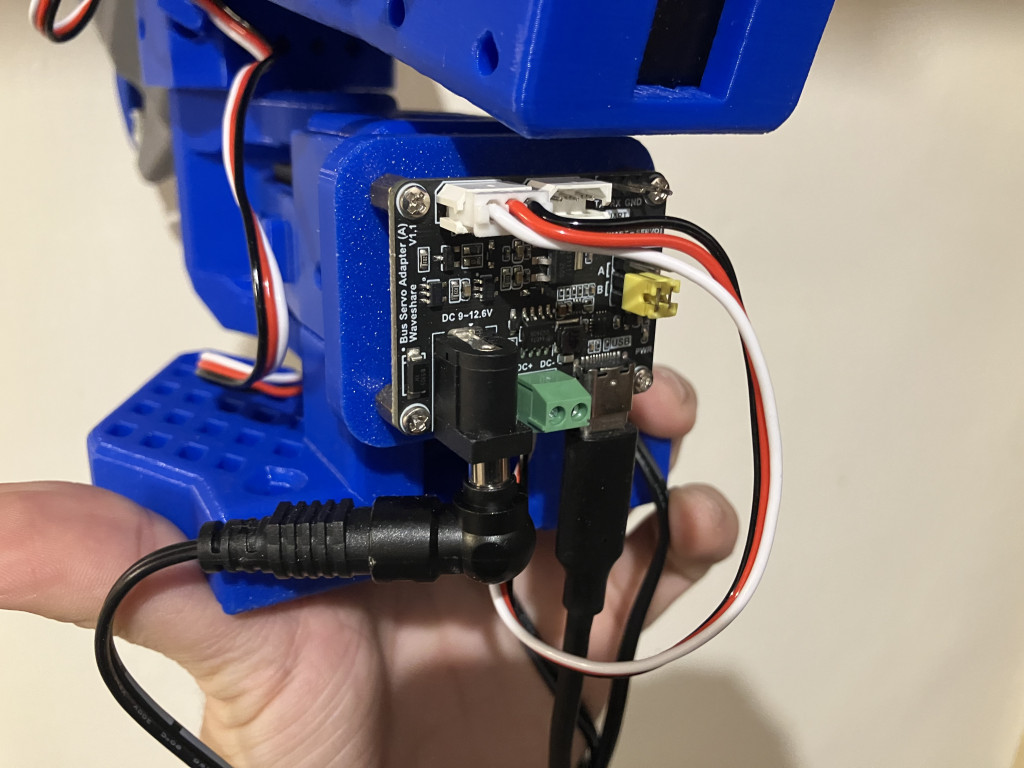
一開始差上線後,先用插拔的方式確保兩隻手臂都有正確連上機器
lerobot-find-port
這邊要開啟與手臂連接 port 的權限
# 如果 dev 後面是別的 port 請自行修改下面的值
sudo chmod 666 /dev/ttyACM0
sudo chmod 666 /dev/ttyACM1
馬達設定,基本上,要從 Gripper 開始設置,3-pin cable 單獨插上主機板
從夾爪開始,直到基座逐一的設置。有些角度的線不好插拔,但有些施力點很好拔,可以多練習,但差回去的時候我自己會用螺絲起子輔助,去把線壓緊。
Leader Setting
lerobot-setup-motors \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \
--teleop.id=my_awesome_leader_arm
Follower Setting
lerobot-setup-motors \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm
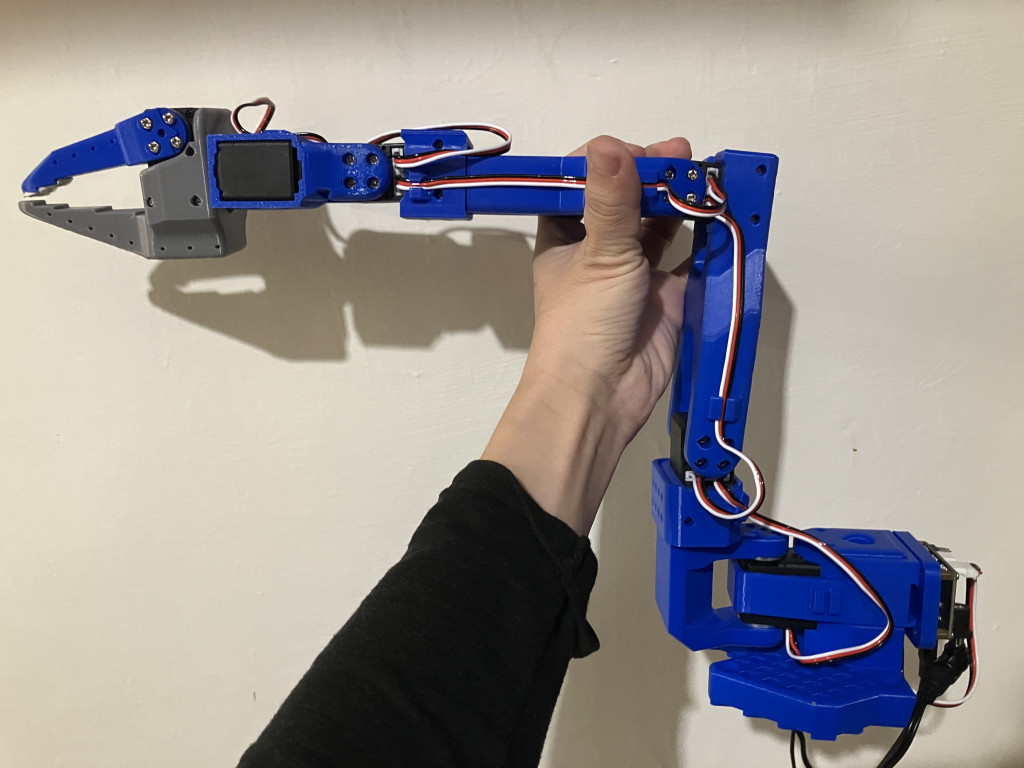
主要是記錄馬達可以旋轉的上界與下界,因為電線的長度有限,可旋轉的幅度並不是無限,所以元件上會有凸起的的部分,確保馬達不會過轉。
Leader Setting
lerobot-calibrate \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \
--teleop.id=my_awesome_leader_arm
Follower Setting
lerobot-calibrate \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm
最後馬達都校正完後,可以先輸入操控的指令,測試 Leader 與 Follower 能否正常執行
lerobot-teleoperate \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \
--teleop.id=my_awesome_leader_arm
如果到這邊,Follower 可以跟著 Leader 正常移動,硬體部分就大功告成了!
有時候會跑指令時,會突然被要求重新校正,那有可能是參數上,沒設定好,例如原本 Follower 用 port 01,下個指令卻輸入成 Leader。盡可能指令要找一個筆記本記錄下來,然後要檢查,採樣、訓練、測試,參數盡可能要相同,例如專案名稱、相機跟手臂的 port … 新手很多錯誤會卡在指令問題,程式又預設不會太多防呆… 盤查也很花時間,所以記得下參數時,一定要注意參數選項跟值的部分。
參考文獻 → SO-101 文件


 iThome鐵人賽
iThome鐵人賽