
這台是DJI M200,一台很貴的無人機.....
目前無人機拍照的時候有以下特點:
說到無人機製圖,就不得不談兩個技術,分別是拼接(mosaic)與影像式建模(image-based modeling, IBM):


在大約十年前,這些技術需要寫程式,但是近年來已經有很多的服務可以達成:
但是呢,將影像建模僅僅是第一步,如果使用他們的軟體或服務只能獲得建模資訊,但是如果要串其他功能就非常的困難(WebODM多程式語言,修改難度超大),但是所幸有出基於pythen的SDK也就是Open Drone Map SDK。
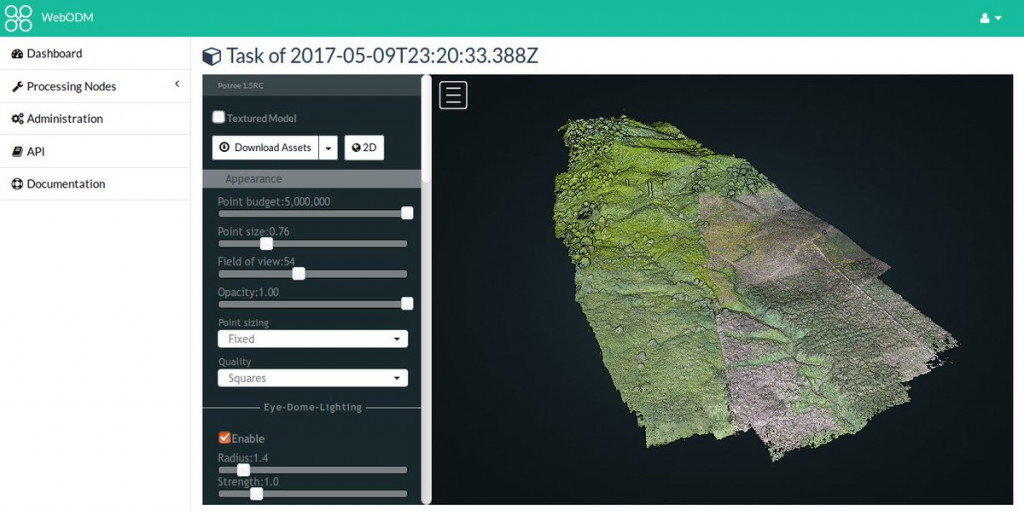
Open Drone Map 是一套可以將影像拼接起來的強大Software development kit(SDK),可以實現影像建模的整個流程,這幾天會著重於如何實現,然後有興趣的人可以看看原理。之後會以如何使用ODM做出影像建模為主。
ODM主要的家族有:
ODM的部分主要是以如何建立自己的點雲模型為主,原理的部分就會比較少一點。
註1:地面解析度:影像中一個像素代表地面上物體的尺寸大小,如1cm/pix代表一個pixel的長度代表1公分的實際地物(可以看出你有沒有戴手錶了)。

