上一篇提到大致上 SystemServer 是透過 ZygoteInit.java 反射啟動的,
首先會進入 main() 方法,main() 會建構一個新的 SystemServer,
然後運行 run() 方法:
frameworks/base/services/java/com/android/server/SystemServer.java
295 public static void main(String[] args) {
296 new SystemServer().run();
297 }
frameworks/base/services/java/com/android/server/SystemServer.java
309 private void run() {
310 try {
311 traceBeginAndSlog("InitBeforeStartServices");
... ...
432 // Start services.
433 try {
434 traceBeginAndSlog("StartServices");
435 **startBootstrapServices**();
436 startCoreServices();
437 startOtherServices();
438 SystemServerInitThreadPool.shutdown();
439 } catch (Throwable ex) {
440 Slog.e("System", "******************************************");
441 Slog.e("System", "************ Failure starting system services", ex);
442 throw ex;
443 } finally {
444 traceEnd();
445 }
這裡是從 8.0 版本就開始改成下面的寫法,
好處是原本 7.1 版本的寫法是新增一個子程序來執行,
因為沒有 trace 回傳子程序結果的判斷,
所以你的母程序不會知道子程序執行結果如何。
若是子程序出現錯誤時,便會出現類似這樣的 log:chatty : uid=1000(system) SensorService expire 1 line
我們可以看到這裡將 startSensorService() 包在 TimingTraceLog 裡面:
frameworks/base/services/java/com/android/server/SystemServer.java
543 private void startBootstrapServices() {
544 Slog.i(TAG, "Reading configuration...");
... ...
692 // The sensor service needs access to package manager service, app ops
693 // service, and permissions service, therefore we start it after them.
694 // Start sensor service in a separate thread. Completion should be checked
695 // before using it.
696 **mSensorServiceStart** = SystemServerInitThreadPool.get().submit(() -> {
697 TimingsTraceLog traceLog = new TimingsTraceLog(
698 SYSTEM_SERVER_TIMING_ASYNC_TAG, Trace.TRACE_TAG_SYSTEM_SERVER);
699 traceLog.traceBegin(START_SENSOR_SERVICE);
700 **startSensorService();**
701 traceLog.traceEnd();
702 }, START_SENSOR_SERVICE);
703 }
其實它真正實作的地方在 JNI 的位置:
frameworks/base/services/core/jni/com_android_server_SystemServer.cpp
31 namespace android {
32
33 static void android_server_SystemServer_startSensorService(JNIEnv* /* env */, jobject /* clazz */) {
34 char propBuf[PROPERTY_VALUE_MAX];
35 property_get("system_init.startsensorservice", propBuf, "1");
36 if (strcmp(propBuf, "1") == 0) {
37 SensorService::instantiate();
38 }
39
40 }
可以順便看到 HIDL 的相關啟動也包含在內:
frameworks/base/services/core/jni/com_android_server_SystemServer.cpp
42 static void android_server_SystemServer_startHidlServices(JNIEnv* env, jobject /* clazz */) {
43 using ::android::frameworks::schedulerservice::V1_0::ISchedulingPolicyService;
44 using ::android::frameworks::schedulerservice::V1_0::implementation::SchedulingPolicyService;
45 using ::android::frameworks::sensorservice::V1_0::ISensorManager;
46 using ::android::frameworks::sensorservice::V1_0::implementation::SensorManager;
47 using ::android::hardware::configureRpcThreadpool;
48
49 status_t err;
50
51 configureRpcThreadpool(5, false /* callerWillJoin */);
52
53 JavaVM *vm;
54 LOG_ALWAYS_FATAL_IF(env->GetJavaVM(&vm) != JNI_OK, "Cannot get Java VM");
55
56 sp<ISensorManager> sensorService = new SensorManager(vm);
57 err = sensorService->registerAsService();
58 ALOGE_IF(err != OK, "Cannot register %s: %d", ISensorManager::descriptor, err);
59
60 sp<ISchedulingPolicyService> schedulingService = new SchedulingPolicyService();
61 err = schedulingService->registerAsService();
62 ALOGE_IF(err != OK, "Cannot register %s: %d", ISchedulingPolicyService::descriptor, err);
63 }
我們可以看到在 android_server_SystemServer_startSensorService 中,
創建線程 start_sensor_service 來實例化 SensorService,
然後將 SensorService 添加到 ServiceManager 當中。
(SensorManager 從 ServiceManager 裡獲取 SensorService)
當 SensorService 被創建時,onFirstRef 被調用。
(為什麼會跳到 onFirstRef 這部份,我建議自行搜尋「智慧指標」參考)
這個初始化函數完成了一些重要的初始化過程,我們來看一下:
frameworks/native/services/sensorservice/SensorService.cpp
138 void SensorService::onFirstRef() {
139 ALOGD("nuSensorService starting...");
140 **SensorDevice& dev(SensorDevice::getInstance());**
141
... ...
這裡很有趣的是,SensorDevice 是一個單例類 (Singleton Pattern),
這是一個高階語言和前後端開發的常見寫法,
它主要做了以下幾件事:
getServicve 看看是否 sensor 的 HIDL service 運行中frameworks/native/services/sensorservice/SensorDevice.cpp
54 SensorDevice::SensorDevice()
55 : mHidlTransportErrors(20), mRestartWaiter(new HidlServiceRegistrationWaiter()) {
56 if (!**connectHidlService**()) {
57 return;
58 }
... ...
87 }
這裡也和 7.1 版本的不太一樣了,直接呼叫 HIDL :
frameworks/native/services/sensorservice/SensorDevice.cpp
89 bool SensorDevice::connectHidlService() {
90 // SensorDevice will wait for HAL service to start if HAL is declared in device manifest.
91 size_t retry = 10;
92
93 while (retry-- > 0) {
94 mSensors = ISensors::getService();
95 if (mSensors == nullptr) {
96 // no sensor hidl service found
97 break;
98 }
99
100 mRestartWaiter->reset();
101 // Poke ISensor service. If it has lingering connection from previous generation of
102 // system server, it will kill itself. There is no intention to handle the poll result,
103 // which will be done since the size is 0.
104 if(mSensors->poll(0, [](auto, const auto &, const auto &) {}).isOk()) {
105 // ok to continue
106 break;
107 }
108
109 // hidl service is restarting, pointer is invalid.
110 mSensors = nullptr;
111 ALOGI("%s unsuccessful, remaining retry %zu.", __FUNCTION__, retry);
112 mRestartWaiter->wait();
113 }
114 return (mSensors != nullptr);
115 }
getSensorsList獲取所有 sensor 的列表mActivationCount 中,activate 接口,對每個 HAL 層的 sensor 執行一次關閉的動作frameworks/native/services/sensorservice/SensorDevice.cpp
54 SensorDevice::SensorDevice()
55 : mHidlTransportErrors(20), mRestartWaiter(new HidlServiceRegistrationWaiter()) {
56 if (!connectHidlService()) {
57 return;
58 }
59
60 float minPowerMa = 0.001; // 1 microAmp
61
62 checkReturn(mSensors->**getSensorsList**(
63 [&](const auto &list) {
64 const size_t count = list.size();
65
66 **mActivationCount.setCapacity**(count);
67 Info model;
68 for (size_t i=0 ; i < count; i++) {
69 sensor_t sensor;
70 convertToSensor(list[i], &sensor);
71 // Sanity check and clamp power if it is 0 (or close)
72 if (sensor.power < minPowerMa) {
73 ALOGE("Reported power %f not deemed sane, clamping to %f",
74 sensor.power, minPowerMa);
75 sensor.power = minPowerMa;
76 }
77 mSensorList.push_back(sensor);
78
79 **mActivationCount.add(list[i].sensorHandle, model)**;
80
81 **checkReturn(mSensors->activate(list[i].sensorHandle, 0 /* enabled */));**
82 }
83 }));
84
85 mIsDirectReportSupported =
86 (checkReturn(mSensors->unregisterDirectChannel(-1)) != Result::INVALID_OPERATION);
87 }
frameworks/native/services/sensorservice/SensorService.cpp
138 void SensorService::onFirstRef() {
139 ALOGD("nuSensorService starting...");
... ...
157 for (ssize_t i=0 ; i<count ; i++) {
158 bool useThisSensor=true;
... ...
186 if (useThisSensor) {
**//此接口會將傳感器父類SensorInterface接口與handle以std::map的方式保存在mHandleMap中**
187 **registerSensor**( new HardwareSensor(list[i]) );
188 }
189 }
190
191 // it's safe to instantiate the SensorFusion object here
192 // (it wants to be instantiated after h/w sensors have been
193 // registered)
**//這就是之前提到的融合演算法初始化**
194 SensorFusion::getInstance();
... ...
265 mWakeLockAcquired = false;
**//創立一個Looper**
266 mLooper = new Looper(false);
... ...
**//當SensorService處於wake_lock狀態,此線程會等待loop應答,
//超時時間5秒,超時後清0所有SensorEventConnection鎖的引用計數**
279 mAckReceiver = new SensorEventAckReceiver(this);
280 mAckReceiver->run("SensorEventAckReceiver", PRIORITY_URGENT_DISPLAY);
**//執行threadLoop()方法,輪詢接收HAL層上報的數據**
281 run("SensorService", PRIORITY_URGENT_DISPLAY);
這裡可以看到 SensorService::onFirstRef 接口,
通過 SensorDevice 獲取傳感器列表信息後,
調用 registerSensor 分別將傳感器添加到 mSensors 中:
frameworks/native/services/sensorservice/SensorService.cpp
305 const Sensor& SensorService::registerSensor(SensorInterface* s, bool isDebug, bool isVirtual) {
306 int handle = s->getSensor().getHandle();
307 int type = s->getSensor().getType();
308 if (mSensors.add(handle, s, isDebug, isVirtual)){
309 mRecentEvent.emplace(handle, new RecentEventLogger(type));
310 return s->getSensor();
311 } else {
312 return mSensors.getNonSensor();
313 }
314 }
上面看到 Looper 被創建接著調用 run 方法,
這是用來監聽傳感器數據的上報和分發,
啟動 threadLoop 輪詢 HAL 層傳感器數據的上報。
來看一下 SensorService 的 threadLoop:
frameworks/native/services/sensorservice/SensorService.cpp
614 bool SensorService::threadLoop() {
615 ALOGD("nuSensorService thread starting...");
... ...
624 SensorDevice& device(SensorDevice::getInstance());
625
626 const int halVersion = device.getHalDeviceVersion();
627 do {
**//調用HAL層poll方法,來獲取所有傳感器數據**
628 ssize_t count = device.poll(mSensorEventBuffer, numEventMax);
629 if (count < 0) {
630 ALOGE("sensor poll failed (%s)", strerror(-count));
631 break;
632 }
... ...
其實後面還有一大段細節,
但我覺得有點像是要把程式碼每一行都看懂一樣繁瑣,
我附連結在底下,就交給有興趣的人自行補完吧。
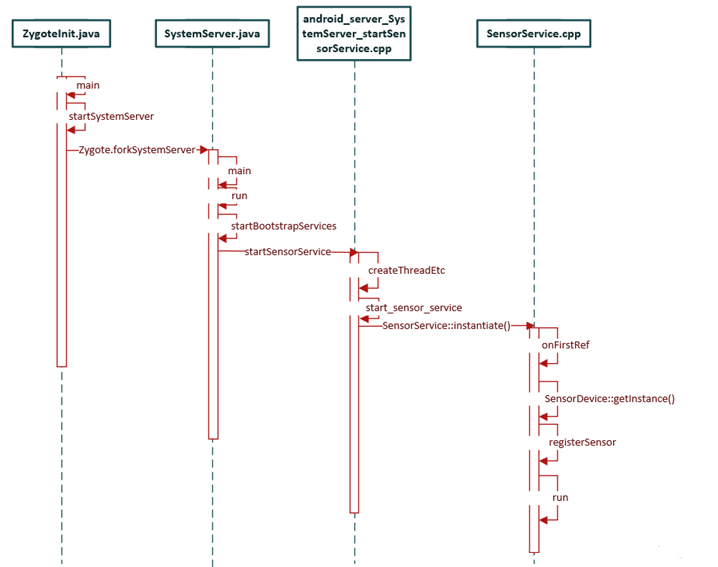
最後再來總結一下 SensorService 的 UML 圖如下:
https://blog.csdn.net/dabenxiong666/article/details/80726022

