在評估兩個3D點群的時候,
有時我們可以透過平面的影像特徵匹配兩個點群之間的關係,
在透過匹配的關係以及空間資訊還原影像的運動姿態。
然而有時候我們的匹配不見得是正確的匹配,
或是我們的影像特徵紋理不明顯,
影像的匹配並不可靠,
這種時候我們可能得嘗試別的解決方法
ICP(Iterative Closest Point迭代最近點)演算法是一種點集對點集配準方法。
當我們有兩個時間點三角測量得到的兩個深度影像點雲,
ICP就是計算怎麼把這個點雲平移旋轉,這兩個點雲儘量重疊,
而點雲之間的匹配是未知的,也許透過ICP得到的點匹配,
再用昨天提到的剛體轉換演算法求解能夠得到比較準確的姿態估計。
而openCV似乎有實作ICP的類別
然而實際操作下似乎跟想像有些落差,
以下是比較重要的涵式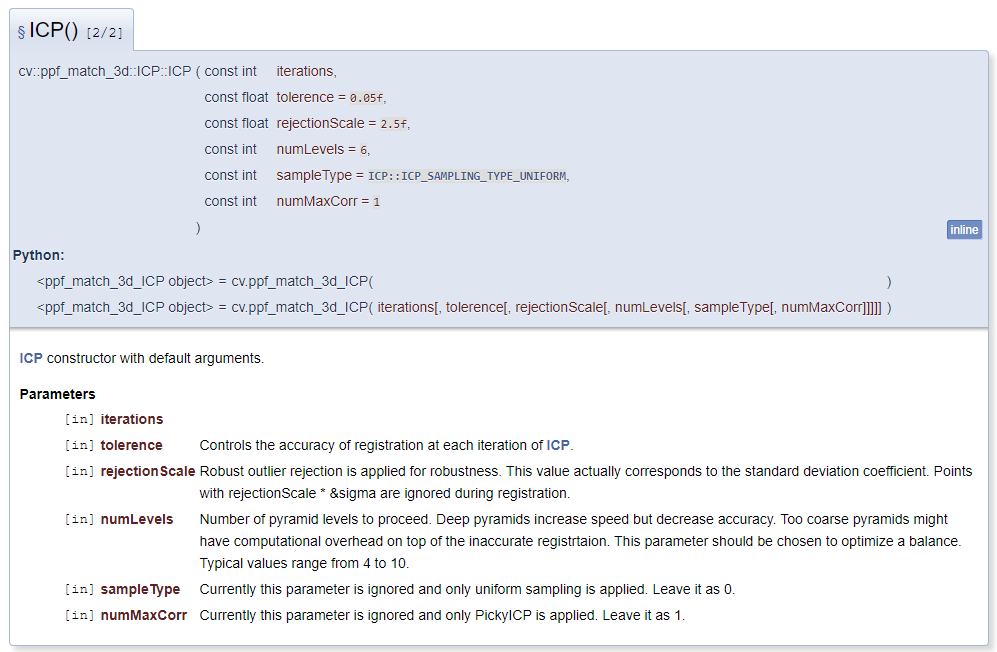
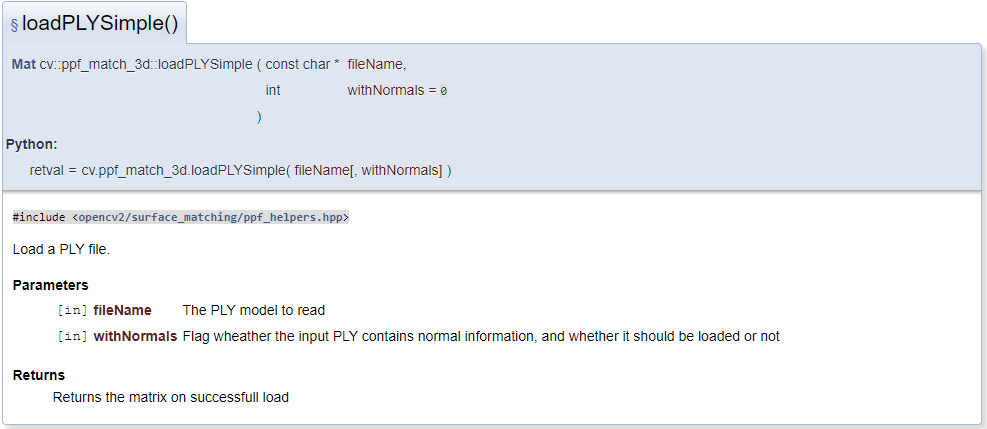
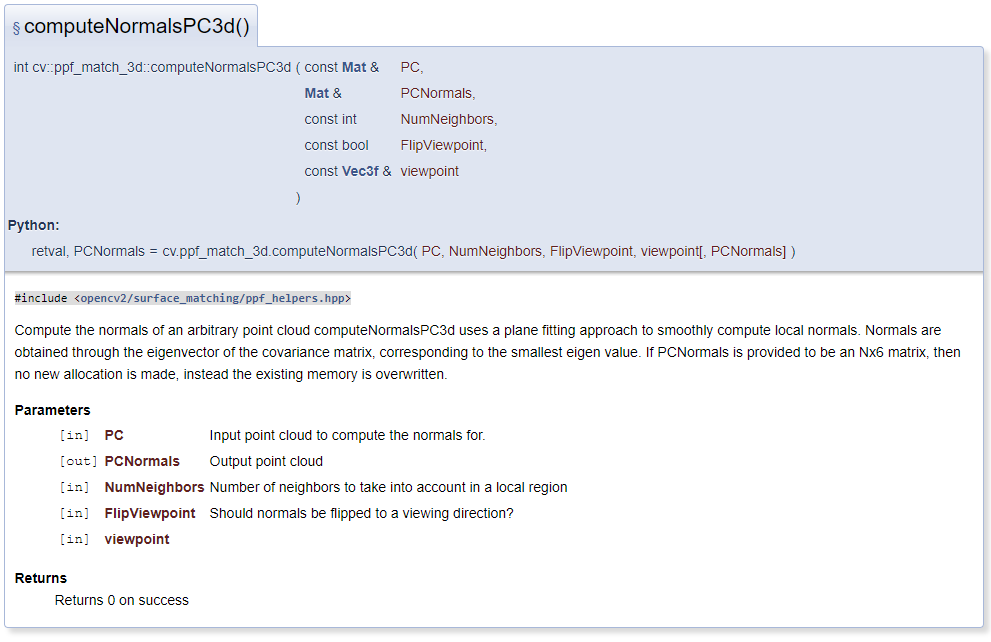
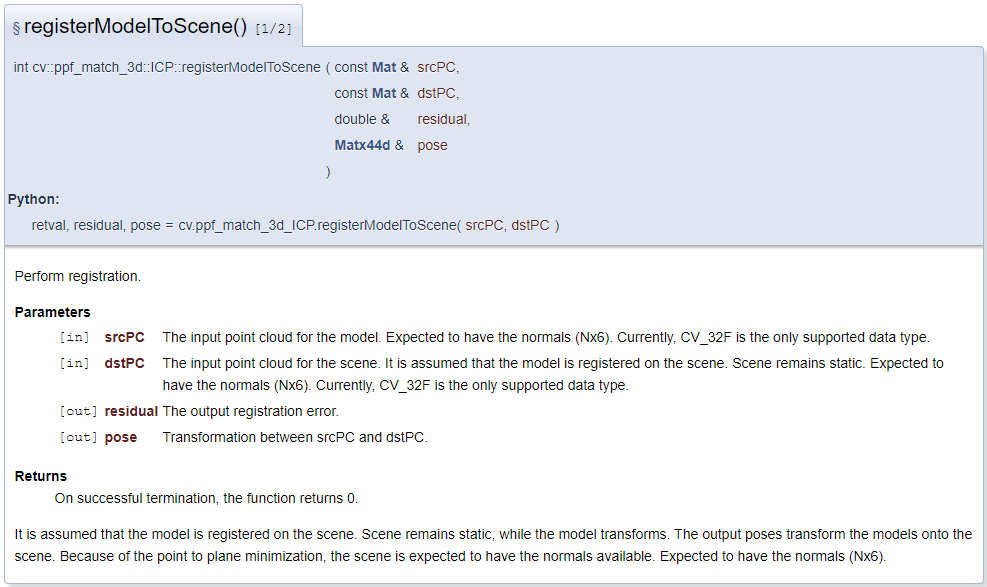
依照涵式的順序應該能有的初步的結果,
但流程似乎有地方出了些錯誤,
我始終得不到一些有意義的結果。
或許openPCL是另外一條路,
除了這邊提到的ICP演算法,
還有些openPCL還有包了VTK視覺化的工具可以使用。

