在介紹n-step Learning之前,我們用cliffwalking來比較Q Learning與Sarsa之間的差異,之後再簡單介紹一下n-step Learning的做法。
先來介紹gym裡面的cliffwalking環境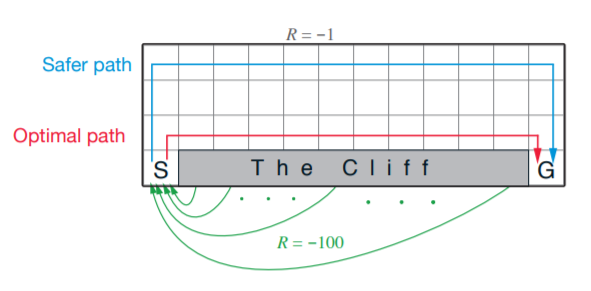
只要經過懸崖(Cliff),就會回到起始點S,並得到reward -100;其餘step則為-1。
一種較安全的走法就是從上方遠離懸崖的地方走,而最佳路徑則是沿著懸崖邊前進。
匯入需要的參數
import gym
import numpy as np
import sys
from collections import defaultdict
env = gym.make('CliffWalking-v0')
gamma = 1.0
epsilon = 0.1
alpha = 0.5
Agent的程式碼與昨天一樣,這邊就不重複了。
run_sarsa(500, True)
print('------------------------------')
run_q_learning(500, True)
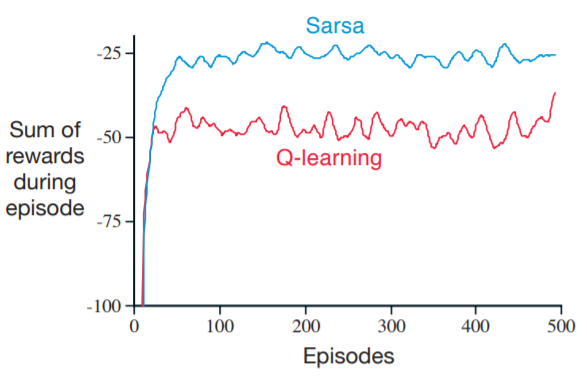
觀察兩種演算法得到的路徑,Q Learning前進的路線為最短路徑,而Sarsa則是偏好較安全的路線。造成這種差異的原因是-greedy,當走在懸崖邊時,有
的機率選擇隨機行為,就有機會跌落山谷。
Q Learning在更新過程中是以max來決定更新的方向,所以假設某個action會跌落山谷,Q Learning並不會以該action來更新,所以對Value Function的影響不大;Sarsa則剛好相反,Sarsa會以下一步的行為來更新,如果下一步會跌入山谷,Sarsa將會大幅減少該State的Value,以至於下個episode不會再走到懸崖邊。
從上例可以發現,Sarsa走的路線相較於Q Learning更為保守。在此例中,使用-greedy的Sarsa效能比Q Learning還要好。
很多教學只提及Q Learning,導致許多人認為Q Learning比Sarsa更好用,事實上兩種算法的使用情形要依照環境來做選擇
在Monte Carlo中,Expected return定義為:
在Temporal Difference中,Expected return定義為:
Temporal Difference不一定只依後一個state來更新。事實上,之前學到的TD Learning稱為1-step TD,我們可以在TD與Monte Carlo中做平衡,稱為n-step TD。
更新方式很簡單,只要將擴展TD中的公式:
其中,指的是
到
的expected return。
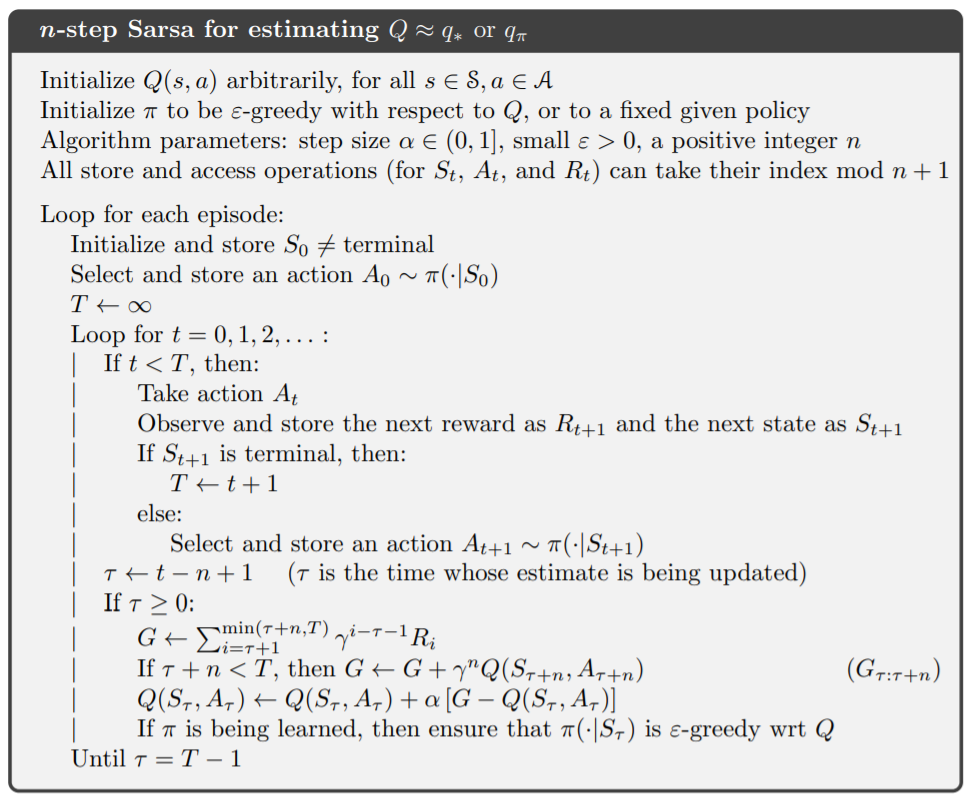
算法看似很複雜,其實只是將原本的部分,移到n step後再算,中間則用reward取代。
而如果遇到Final State,則提前結束。
如果要實現n-step Q Learning的話,我們就必須引入importance sampling。可參考sutton書中7-3節
n-step Learning在實務上並沒有特別實用,我們就不再深入討論。但透過n-step Learning,能讓我們稍微理解TD Learning與Monte Carlo之間的關係。Monte Carlo其實就是一種擴展後的TD Learning。

