這裡要先聲明,我沒有修過專業的控制相關課程,如果想要學習更專業的PID相關內容可能這裡不適合,我只是將我這個暑假所研究的成果記錄下來分享給大家,對於最基礎的馬達控速應該是沒問題啦。
PID是「控制方法」,是根據目前狀態與預設值的偏差值,按比例、積分、微分等運算,運算結果用以輸出來進行控制。以馬達來說,我們需要的是馬達以一個恆定的速度轉動,因此先透過之前介紹過的encoder(編碼器),來得知目前的轉速,再以上述的運算,最後根據計算的結果來輸出電壓。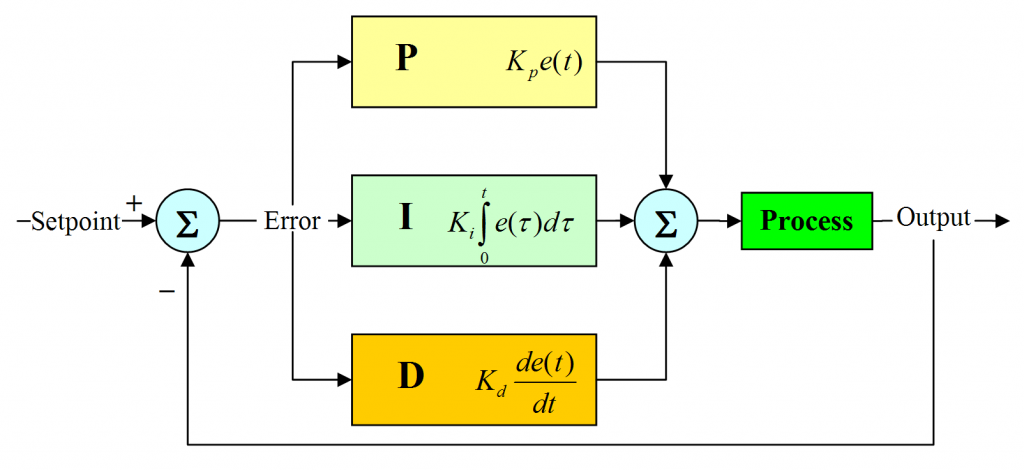
我們先不要管PID,我們來想想看:假設要控制房間到一個恆定的溫度20度,冷氣應該要怎麼設定?(假設室溫30度)
思路如下:
起初為了讓室溫快速降低,可以先開冷一點,那先開個15度好了。
過了5分鐘,室溫果真快速降低,現在已經到20度,趕快把冷氣調成20度。
再過了2分鐘,ㄨㄚˊ怎麼變19度了...,那我再調成21度
過了幾分鐘,阿又變成20.5度...
當室溫與目標值差異很大的時候,我們會輸出較低的溫度(假設室溫>目標值),而等到溫差很小,或是溫度顯示已經達目標值時,我們就輸出與目標值相當接近的溫度。
但問題來了,為什麼我們在顯示為20度時,將冷氣設為20度,溫度卻還會繼續下降呢?
一般的感測器都會有延遲的現象,像實驗室時常用的酒精溫度計,總是要放一陣子以等待溫度平衡。因此當它顯示20度時,實際上很可能室溫是小於20度的。
事實上,上面的這個控制的思路很類似P的運算。再舉另外一個例子,假設初始時刻,水缸裡的水位是0.2米,那麼當前時刻的水位和目標水位之間是存在一個誤差的(error),。假設旁邊站著一個人,這個人通過往缸里加水的方式來控制水位。如果單純的用比例控制演算法,就是指加入的水量u和誤差error是成正比的。
u=kperror
假設kp取0.5,現在的水位高度是0.2,目標值為1
t=1時,error=1-0.2=0.8,u=0.50.8=0.4,因此水位從0.2上升到0.6
t=2時,error=1-0.6=0.4,u=0.5*0.4=0.2,因此水位從0.6上升到0.8
如此這麼循環下去,最終水位會到達我們所設定的1。
但是,單單的比例控制存在著一些不足,其中一點就是–穩態誤差!
像上述的例子,根據kp取值不同,系統最後都會達到1米,只不過kp大,到達的快,kp小了到達的慢一些。不會有穩態誤差。但是,考慮另外一種情況,假設這個水缸在加水的過程中,存在漏水的情況,假設每次加水的過程,都會漏掉0.1米高度的水。仍然假設kp取0.5,那麼會存在著某種情況,假設經過幾次加水,水缸中的水位到0.8時,水位將不會再變換!!!因為,水位為0.8,則誤差error=0.2. 所以每次往水缸中加水的量為u=0.5*0.2=0.1.同時,每次加水,缸裡又會流出去0.1米的水!!!加入的水和流出的水相抵消,水位將不再變化!!
實際上,這種類似於「漏水」的情況相當常見,以馬達來說,摩擦力就相當於是這個例子中的「漏水」。
還是用上面的例子,如果僅僅用比例會存在穩態誤差,最後的水位就卡在0.8了。於是,在控制中,我們再引入一個分量,該分量和誤差的積分是正比關係。所以,比例+積分控制演算法為:
u=kp*error+ ki∗∫ error
大家可能會好奇實際寫程式要怎麼做積分?又不是已經知道的一個函數。沒錯,事實上我們並不是在做積分,而是在離散情況下做累加(sigma)。
還是用上面的例子來說明,
第一次的誤差error是0.8,第二次的誤差是0.4,∫error=0.8+0.4=1.2. 這個時候的控制量,除了比例的那一部分,還有一部分就是一個係數ki乘以這個積分項。由於這個積分項會將前面若干次的誤差進行累計,所以可以很好的消除穩態誤差(假設在僅有比例項的情況下,系統卡在穩態誤差了,即上例中的0.8,由於加入了積分項的存在,會讓輸入增大,從而使得水缸的水位可以大於0.8,漸漸到達目標的1.0.)這就是積分項的作用。
換一個另外的例子,考慮刹車情況。平穩的駕駛車輛,當發現前面有紅燈時,為了使得行車平穩,基本上提前幾十米就放鬆油門並踩刹車了。當車輛離停車線非常近的時候,則使勁踩刹車,使車輛停下來。整個過程可以看做一個加入微分的控制策略。
與積分控制類似,在離散的情況下,我們沒辦法做到真正的「微分」,我們實際上在做的是error的差值,就是t時刻和t-1時刻error的差,即u=kd*(error(t)-error(t-1))/T,其中的kd是一個係數項。可以看到,在刹車過程中,因為error是越來越小的,所以這個微分控制項一定是負數,在控制中加入一個負數項,他存在的作用就是為了防止汽車由於刹車不及時而闖過了線。
切換到上面給水缸加水的例子,就是當發現水缸裡的水快要接近1的時候,加入微分項,可以防止給水缸裡的水加到超過1米的高度,說白了就是減少控制過程中的震盪。
最後附上一個公式作為今天的結尾