CRTK比賽的算是手術自動化的前身,不是醫師用達文西手術平台幫病人開刀,是看有沒有可能用電腦操控達文西幫病人開刀,所以先用幾項外科醫師學習達文西手術的基本動作之一,Peg Transfer,來看看.白話的說就是操控達文西手術平台,左手檢物品,移動一段距離,交給右手,右手放到某定點.
至於CRTK競賽要求的2.0版,用他網頁方式2的Dockfile好像沒有用,你會發現找不到~/ambf/bin/lin-x86_64/下的所有執行檔,所以我用方式1的python方式
apt-get install ros-noetic-cv-bridge ros-noetic-image-transport #安裝套件
cd ~/ambf #裝CRTK相關
git clone https://github.com/collaborative-robotics/surgical_robotics_challenge.git
cd surgical_robotics_challenge/scripts/ #Clone this repo方式1
pip3 install -e .
之後可以測試
roscore #先開啟,否則執行出現Error,按Ctrl-C中斷只會出現部份畫面
另外開一個terminal
~/ambf/bin/lin-x86_64/ambf_simulator --launch_file ./launch.yaml -l 0,1,3,4,14,15 -p 120 -t 1 --override_max_comm_freq 120
另外開第3個terminal
python3 ~/ambf/surgical_robotics_challenge/scripts/surgical_robotics_challenge/examples/gui_based_control.py
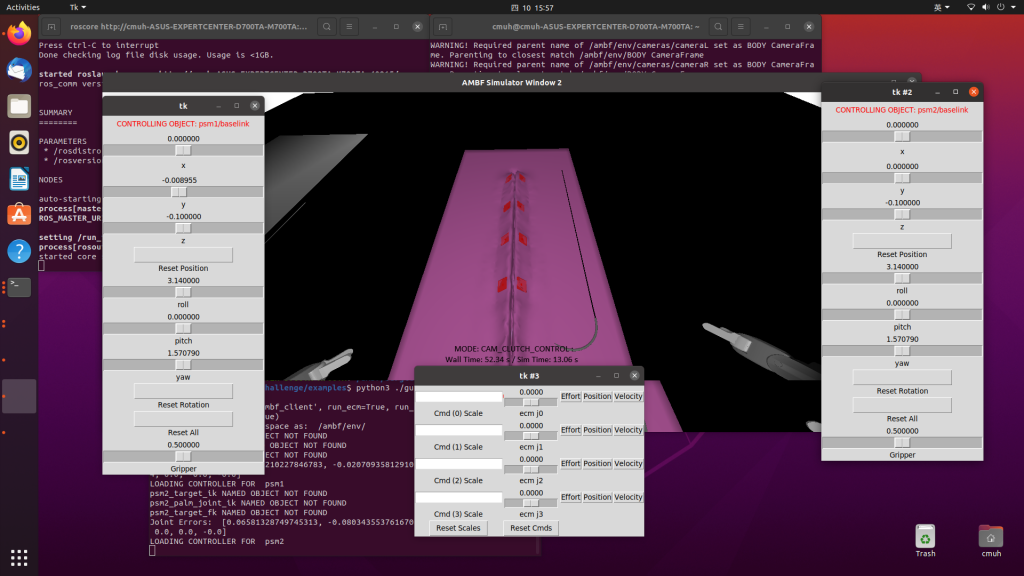
分別是左右手跟內視鏡的控制bar,就開始可以玩了
...自動化的部份,還沒問到,待續
 jaujie
jaujie
