irob-saf也是另一個嘗試手術自動化的套件
我後來發現,有些問題,所以寫信去作者,結果作者Tamas很可愛,他居然修正一些Noetic跟python3必須更動的東西,所以修正後安裝其實很順利.
先裝完ROS Noetic跟dVRK然後照著裝
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool build-essential python3-catkin-tools #安裝一些必須套件
sudo apt install libeigen3-dev
#安裝
source ~/catkin_ws/devel/setup.bash
cd ~/catkin_ws/src
wstool merge https://raw.githubusercontent.com/ABC-iRobotics/irob-saf/master/irob-saf/irob_saf.rosinstall # or replace "master" with the corresponding branch
wstool up
cd ~/catkin_ws
catkin build irob-saf
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc #設定環境變數
source ~/.bashrc
然後執行
roslaunch dvrk_robot dvrk_arm_rviz.launch arm:=PSM1 config:=/home/$(whoami)/catkin_ws/src/cisst-saw/sawIntuitiveResearchKit/share/console/console-PSM1_KIN_SIMULATED.json
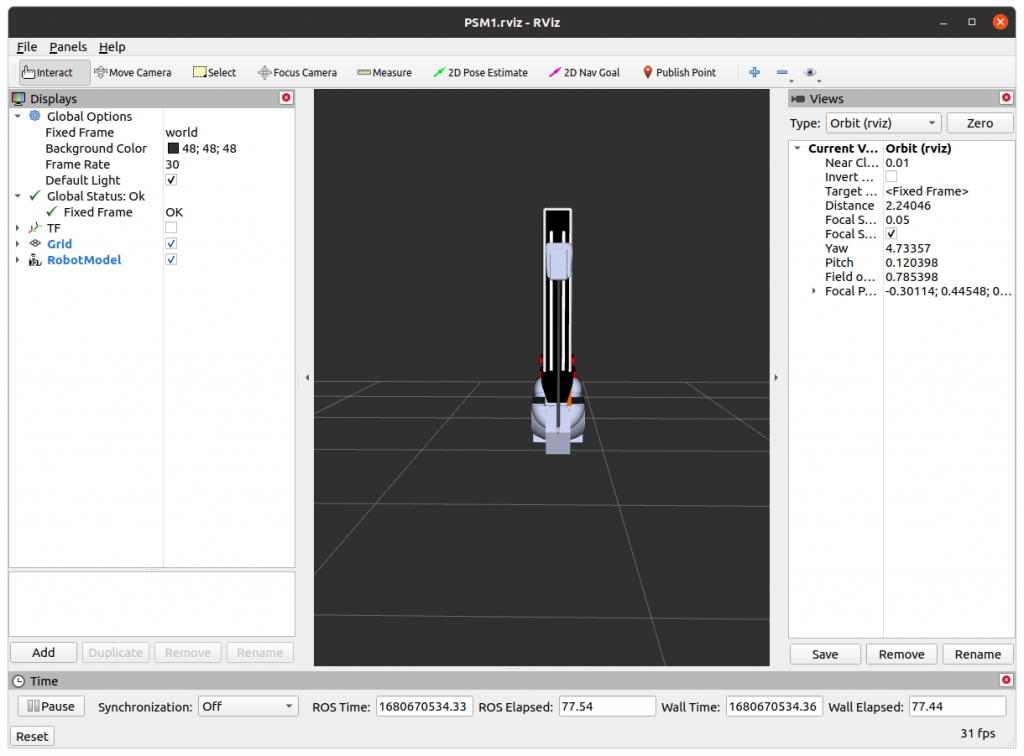
他會呼叫出dVRK,然後去dVRK那按HOME(這是作者截圖畫面,我們沒有dVRK硬體,所有手臂應該都是Disable)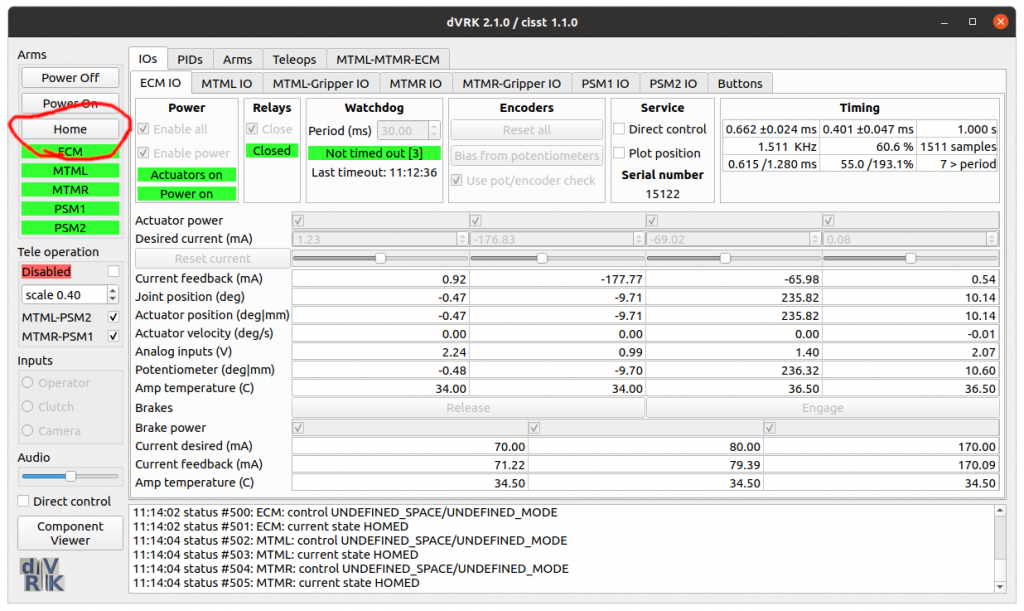
然後再開一個終端機(後面每個node都要開一個終端機),接著執行
roslaunch irob_vision_support dummy_target.launch
然後去RViz左下Add,選By topic, 把這/saf/vision/dummy_target_marker展開候選marker,再OK,就可以看到手臂前端有個小小綠色亮點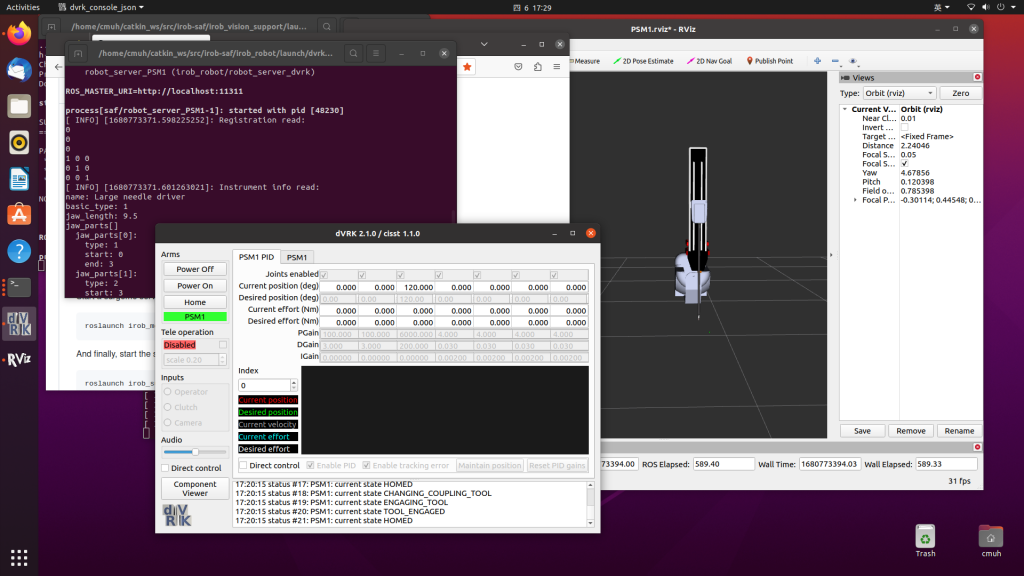
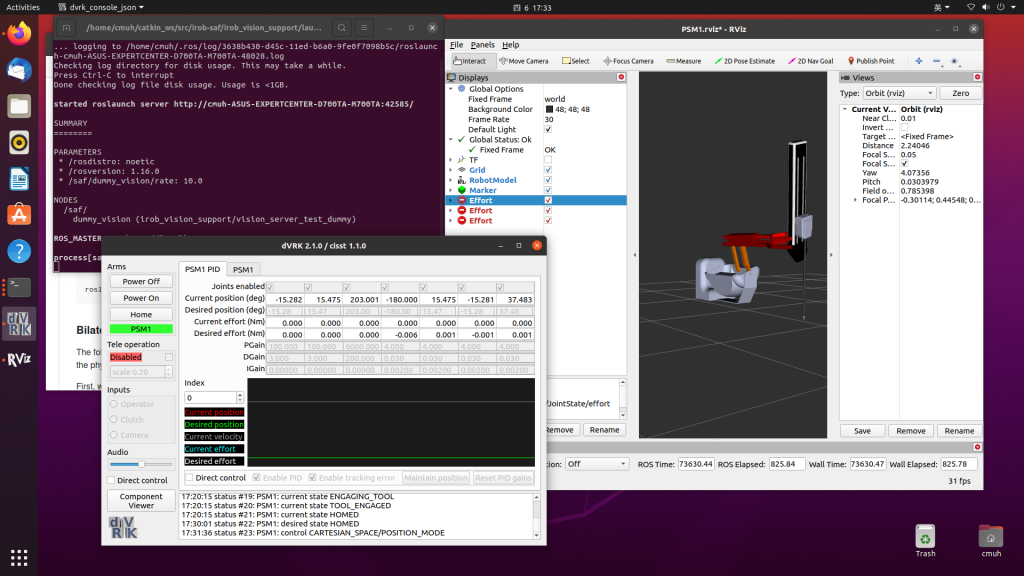
然後依序開終端機執行,並且重複上面,在RViz左下Add->by Topic->選完按OK
roslaunch irob_vision_support dummy_vision.launch
roslaunch irob_robot dvrk_server.launch arm_typ:=PSM1 camera_registration_file:=registration_identity.yaml instrument_info_file:=large_needle_driver.yaml #從這以下,因為沒有硬體,所以其實有問題
roslaunch irob_motion surgeme_server.launch
roslaunch irob_subtask_logic dummy_grasp.launch
後面這3個有問題的指令,等我詢問作者後,在跟各位回報...
 jaujie
jaujie
