這兩邊都要Matlab 2019b以後的版本
(1)這篇看起來,著重在da Vinci PSM前端夾子jaw的咬合力,跟動作. 照它網頁寫的,在RAL-2018子目錄下的plot_torque.m可以先跑看看,會先調出之前的資料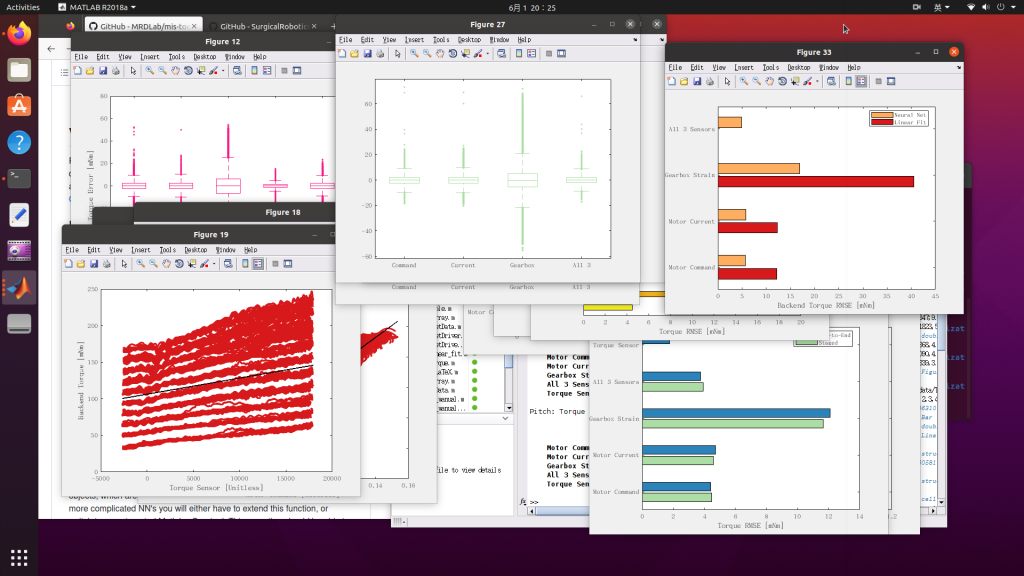
可是visulization下的檔案,在2018a無法跑.
(2)這篇提供自己的da Vinci kinematics data,取名為ROSMA dataset;不過dataset要另外下載(很慢,建議先下載一個就好)
然後執行roscore
然後執行Matlab, 在Matlab的GUI的命令列執行
cd ~/rosma_dataset/Matlab_GUI
run('gui_rosma')
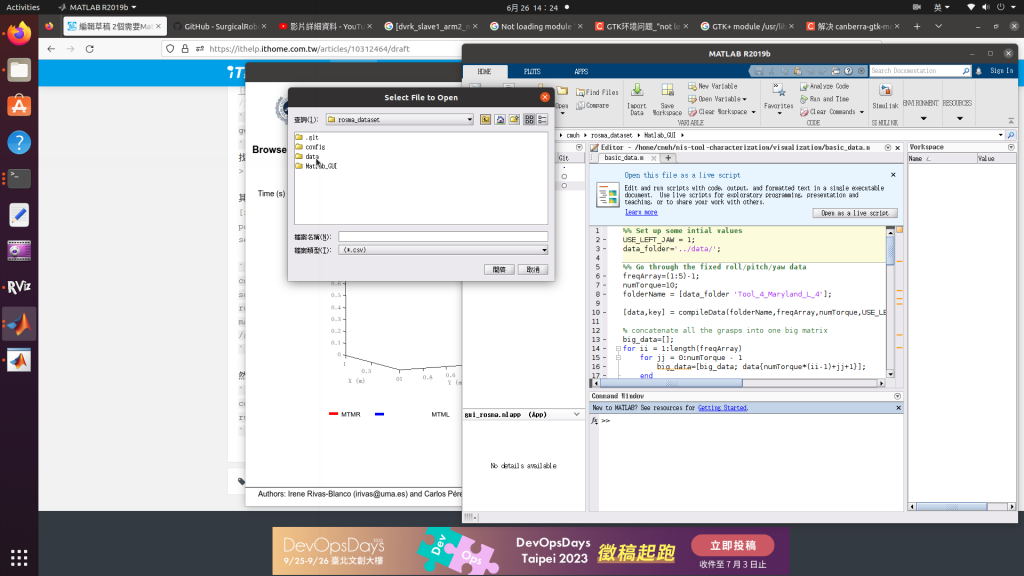
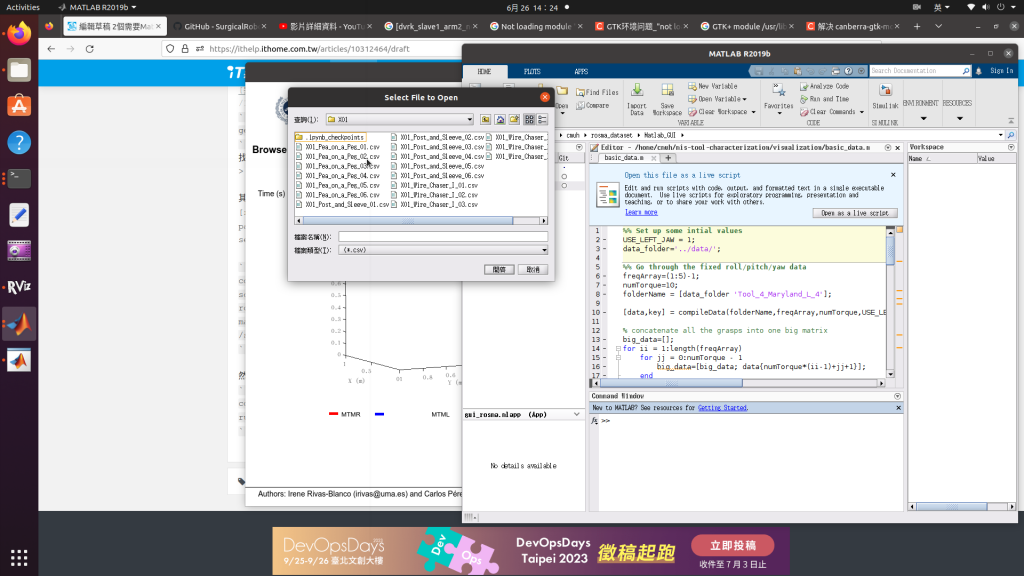
之後按Browse鈕選擇csv檔所在的地方,例如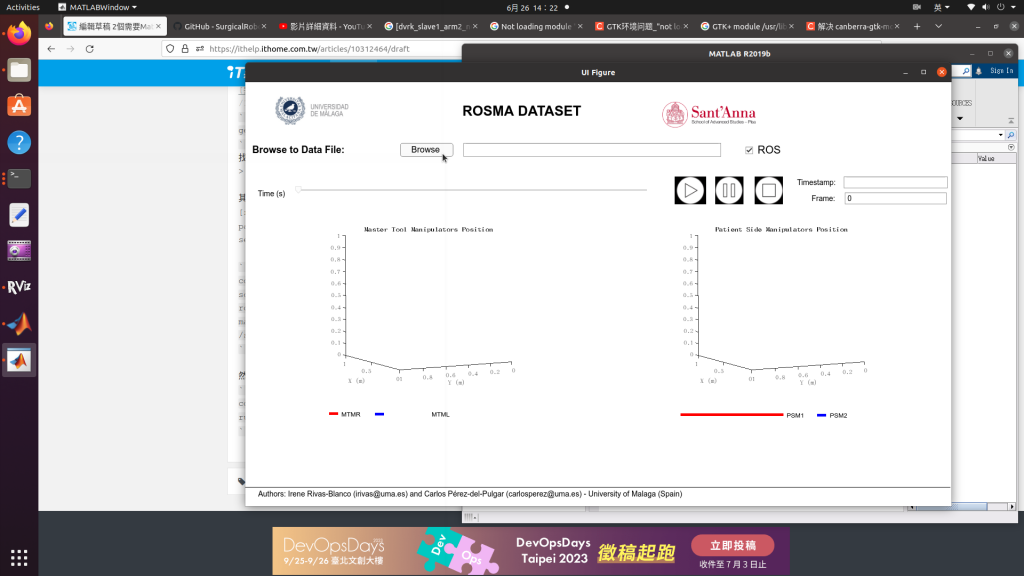
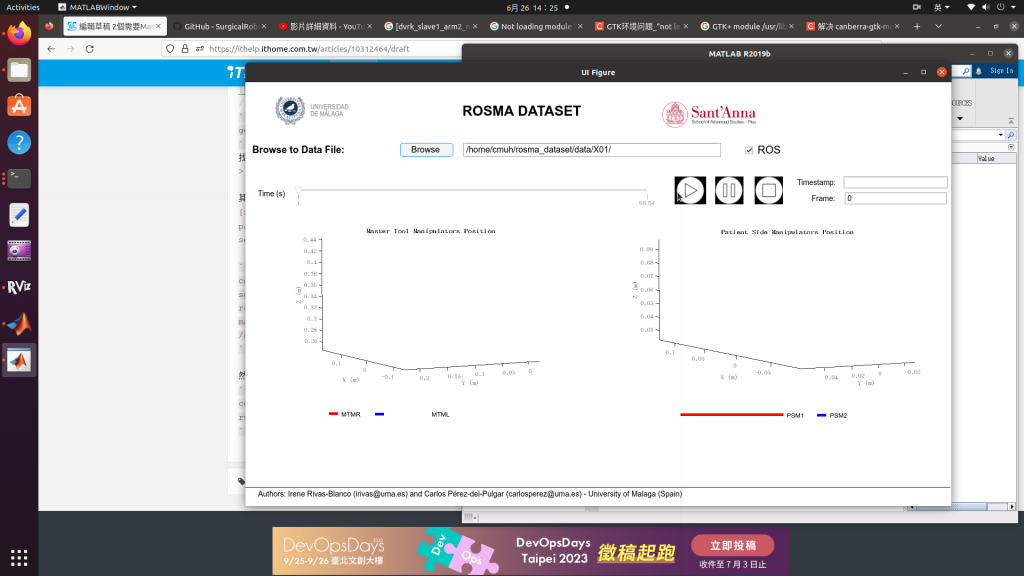
然後按Play三角形
就可以看到MTL跟PSM軌跡
-----
如果要在RViz看動作,似乎行不通
#拷貝一些設定檔,將rosma/config下的檔案copy到
cp ~/rosma_dataset/config/full_system.rviz ~/catkin_ws/src/dvrk-ros/dvrk_model/rviz_config
cp ~/rosma_dataset/config/dvrk_full_rviz.launch ~/catkin_ws/src/dvrk-ros/dvrk_robot/launch
cp ~/rosma_dataset/config/sawControllersPID-PSM_modified.xml ~/catkin_ws/src/cisst-saw/sawIntuitiveResearchKit/share
cp ~/catkin_ws/src/cisst-saw/sawIntuitiveResearchKit/share/tool/LARGE_NEEDLE_DRIVER_420006.json ~/catkin_ws/src/cisst-saw/sawIntuitiveResearchKit/share/psm-large-needle-driver.json #抓不到
cp ~/catkin_ws/src/cisst-saw/sawIntuitiveResearchKit/share/tool/sawControllersPID-MTMR.xml ~/catkin_ws/src/cisst-saw/sawIntuitiveResearchKit/share #抓不到
cp ~/catkin_ws/src/cisst-saw/sawIntuitiveResearchKit/share/tool/sawControllersPID-MTML.xml ~/catkin_ws/src/cisst-saw/sawIntuitiveResearchKit/share #抓不到
cp ~/catkin_ws/src/cisst-saw/sawIntuitiveResearchKit/share/kinematic/mtmr.json ~/catkin_ws/src/cisst-saw/sawIntuitiveResearchKit/share/mtm.json #抓不到
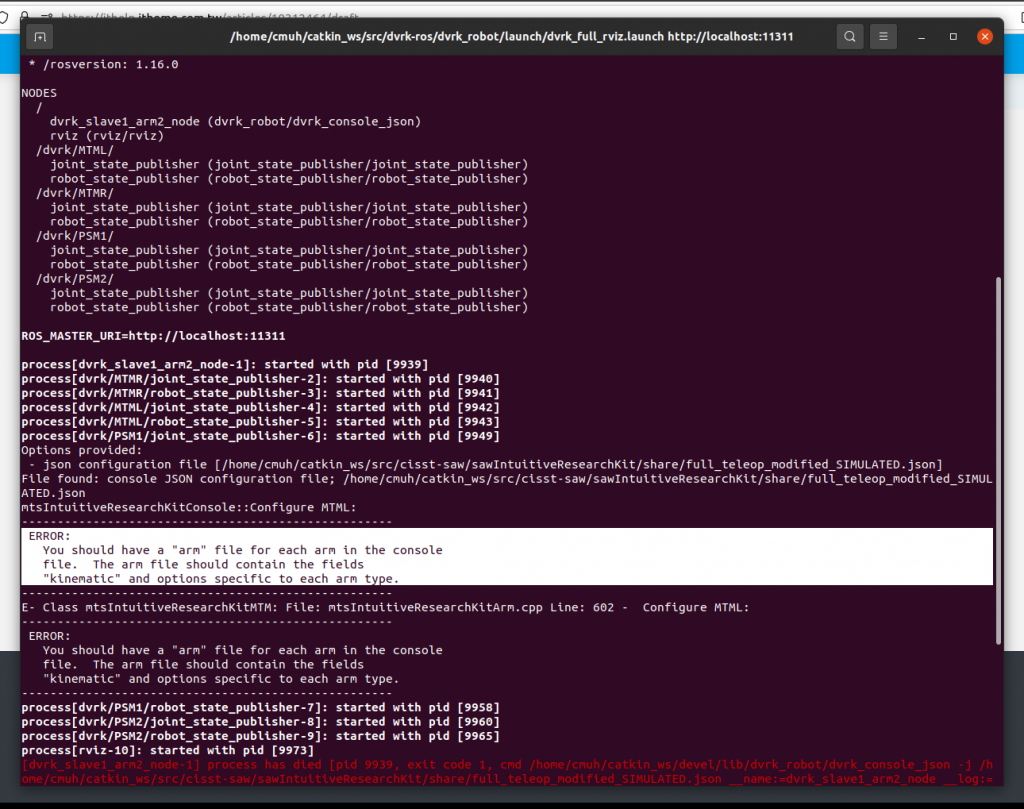
cp ~/rosma_dataset/config/full_teleop_SIMULATED.json ~/catkin_ws/src/cisst-saw/sawIntuitiveResearchKit/share/full_teleop_modified_SIMULATED.json #有錯
gedit ~/catkin_ws/src/dvrk-ros/dvrk_robot/launch/dvrk_full_rviz.launch
找到4個
node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher"
其中type全部改為type="robot_state_publisher", 否則會出現"ERROR: cannot launch node of type [robot_state_publisher/state_publisher]: Cannot locate node of type [state_publisher] in package [robot_state_publisher]. Make sure file exists in package path and permission is set to executable (chmod +x)"
cd ~/catkin_ws
source devel/setup.bash
roslaunch dvrk_robot dvrk_full_rviz.launch slave1:=PSM1 slave2:=PSM2 master1:=MTMR master2:=MTML config:=/home/$(whoami)/catkin_ws/src/cisst-saw/sawIntuitiveResearchKit/share/full_teleop_modified_SIMULATED.json
可惜還是有問題,它沒有辦法PSM1, PSM2, MTML, MTMR分開, 因此無法連動上面Matlab的軌跡運動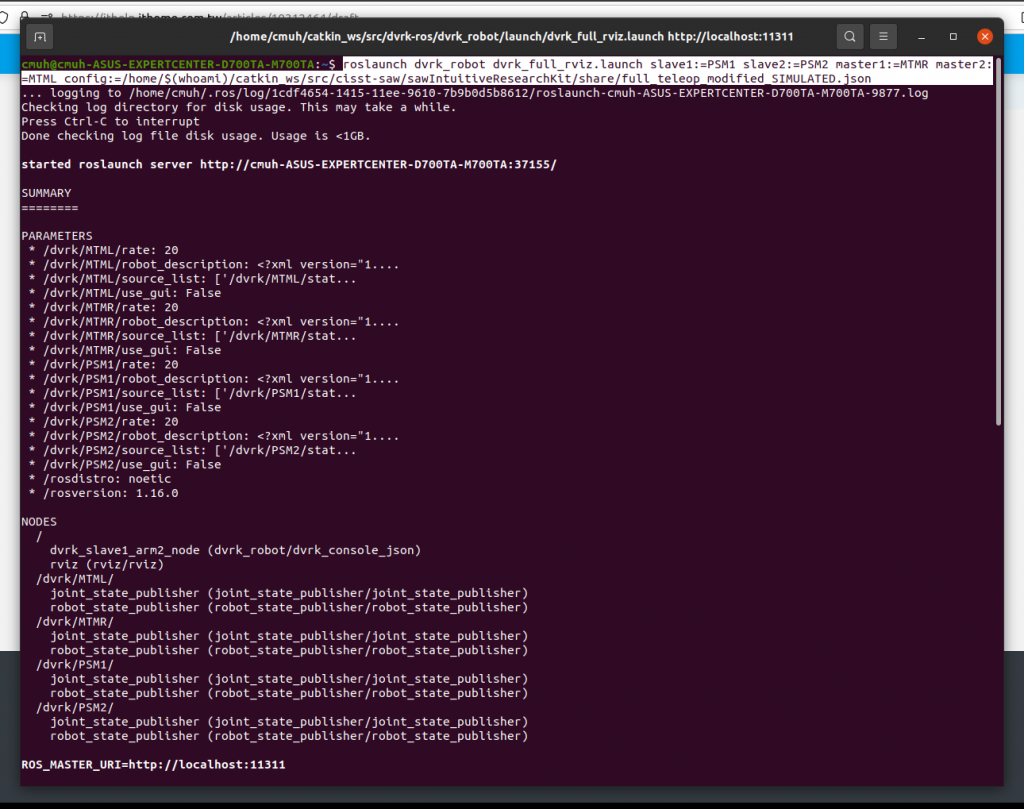
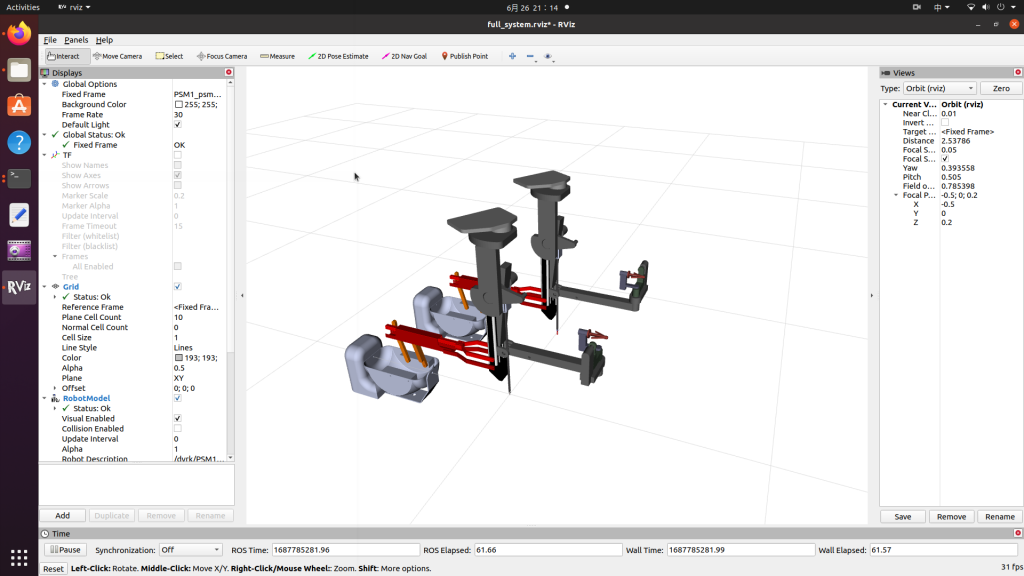
你可以看到連PSM跟MTM都連在一起
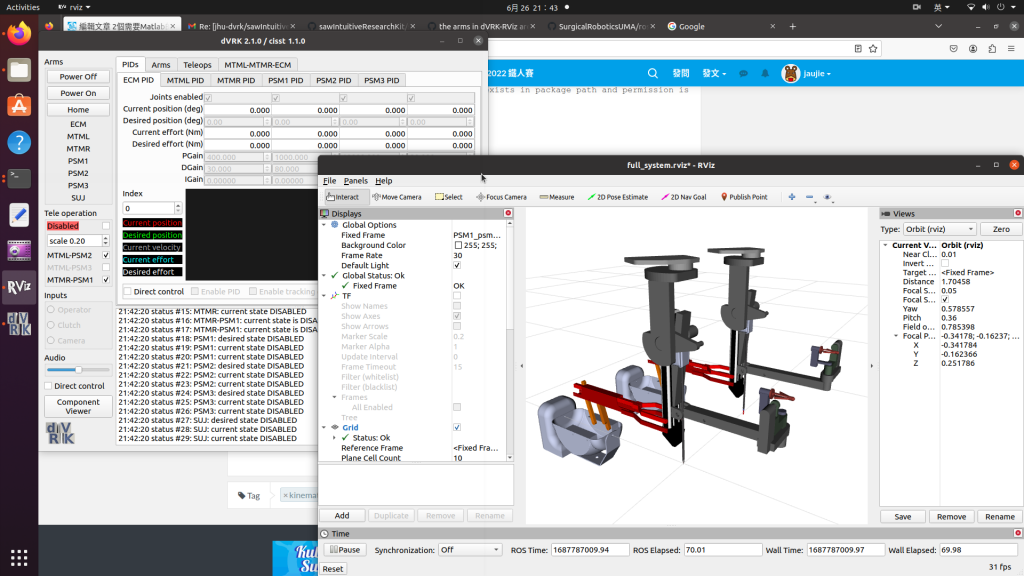
我把share/console/console-full-system-simulated.json拿來執行,它會叫出dVRK,但問題一樣
roslaunch dvrk_robot dvrk_full_rviz.launch slave1:=PSM1 slave2:=PSM2 master1:=MTMR master2:=MTML config:=/home/$(whoami)/catkin_ws/src/cisst-saw/sawIntuitiveResearchKit/share/console/console-full-system-simulated.json
 jaujie
jaujie
