昨天介紹了future的特徵,現在我們要由上而下的看一個非同步應用程式,今天要介紹的內容參考這裡,我們要看看runtime如何處理一個非同步程式問題。
假設有一段簡單的非同步的程式碼如下:
#[tokio::main]
async fn main(){
task1();
println!("----async_main-----");
task2().await;
}
async fn task1() {
println!("-------task1-------");
}
async fn task2() {
println!("-------task2-------");
}
//// 結果:
//// ----async_main-----
//// -------task2-------
如果跟我一樣是C#的使用者,大概會覺得很納悶,task1()的輸出怎麼不見了?這是因為rust的非同步是延遲評估的,除非遇到await修飾詞,否則那個future物件不會作用。如果要看到task1()如期作用,程式碼要改成這樣:
#[tokio::main]
async fn main(){
task1().await;
println!("----async_main-----");
task2().await;
}
//// 結果:
//// -------task1-------
//// ----async_main-----
//// -------task2-------
如此一來就可以看到main()如我們意料般的輸出。
我們來分析一下main()這個非同步方法,內部可以分成幾個狀態:
main()開始(MainStart)task1()運行(Task1Running)task2()運行(Task2Running)main()完成(MainComplete)可以用一個enum來對方法內狀態建立模型:
enum MainState{
MainStart,
Task1Running,
Task2Running,
MainComplete
}
task1()與task2()這兩個方法也有各自的內部狀態,當然也可以用enum來描述。那麼只要將這些enum透過某種方式連結起來,我是不是就得到了一個能夠描述main()內部所有狀態的模型呢?我們再來改一下上面的MainState:
enum MainState{
MainStart,
Task1Running(Task1State),
Task2Running(Task2State),
MainComplete
}
沒錯,只要善用enum本身的特性,就可以得到一個描述main()中狀態的樹狀結構。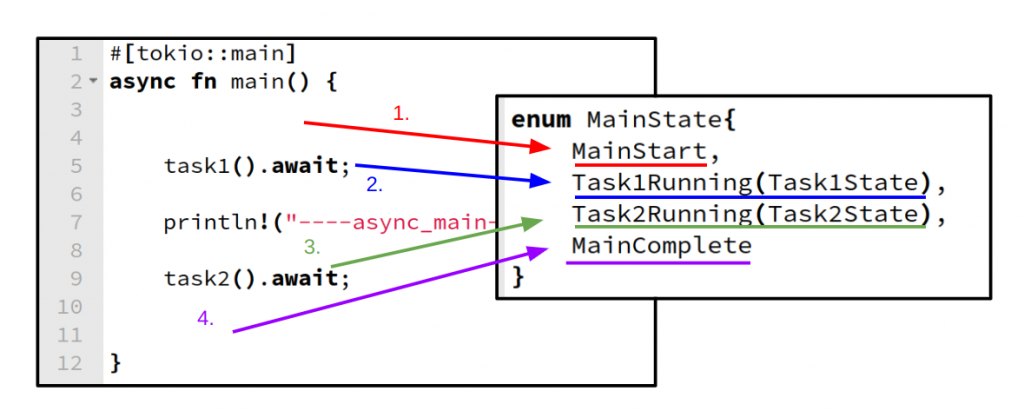
但其實我們可以更進一步把MainState.Task1Runing及MainState.Task2Runing的內部成員改成一個future物件:
enum MainState{
MainStart,
Task1Running(Task1Future),
Task2Running(Task2Future),
MainComplete
}
為什麼要這樣改呢?因為這樣的資料結構有利於runtime走訪應用程式的內部狀態。
既然我們要把async fn Main()作為一個future,那就來嘗試實做看看吧,首先定義一個結構體來表示main():
pub struct MainFuture
{
state: MainState
}
為求便於說明,我們來實做之前用到的SimpleFuture:
impl SimpleFuture for MainFuture {
type Output = ();
fn poll(&mut self, wake: fn()) -> Poll<Self::Output> {
match self.state {
//// 當MainFuture的狀態為MainStart時
//// 要把狀態變更為下一步Task1Running
//// 並且回傳Pending
MainState::MainStart => {
self.state = MainState::Task1Running(Task1Future::new());
Poll::Pending
},
//// 當MainFuture的狀態為Task1Running時
//// 須取出task1,並且詢問task1的狀態
//// 如果task1尚未完成,代表main也還沒完成,所以不做任何事
//// 如果task1已完成,要把狀態變更為下一步Task2Running
//// 但main還沒做完,所以回傳Pending
MainState::Task1Running(task1) => {
if task1.poll(wake) == Poll::Pending {
Poll::Pending
} else {
self.state = MainState::Task2Running(Task2Future::new());
Poll::Pending
}
},
//// 當MainFuture的狀態為Task2Running時
//// 須取出task2,並且詢問task2的狀態
//// 如果task2尚未完成,代表main也還沒完成,所以不做任何事
//// 如果task2已完成,要把狀態變更為下一步MainComplete
//// 實際上Task2完成代表整個Main都完成了
//// 所以回傳Ready
MainState::Task2Running(task2) => {
if task2.poll(wake) == Poll::Pending {
Poll::Pending
} else {
self.state = MainState::MainComplete;
Poll::Ready(())
}
},
MainState::Complete => Poll::Ready(())
}
}
}
上面的程式碼嘗試把main()以一個實做了SimpleFuture的結構來表示,而runtime做的事情就是調用poll方法來詢問main()的狀態。當poll()被調用的時候,MainFuture會依照內部的狀態決定是否要詢問子層future的狀態,並且將wake方法往下傳遞。runtime會在適當的時候調用poll來確認main()的狀態,而這個不斷詢問的過程就是在走訪由各非同步作業組成的狀態樹。
接下來我們節錄一小段tokio的block_on方法看看runtime到底在做什麼:
pub(crate) fn block_on<F: Future>(&mut self, f: F) -> Result<F::Output, AccessError> {
use std::task::Context;
use std::task::Poll::Ready;
// `get_unpark()` should not return a Result
let waker = self.waker()?;
let mut cx = Context::from_waker(&waker);
pin!(f);
loop {
if let Ready(v) = crate::runtime::coop::budget(|| f.as_mut().poll(&mut cx)) {
return Ok(v);
}
self.park();
}
}
整個非同步的故事大概像下面這樣: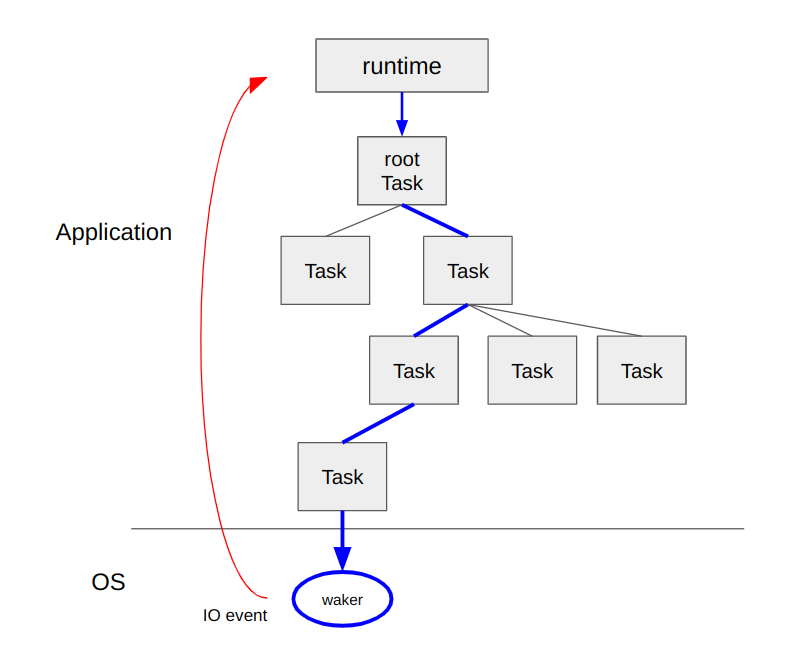
block_on內會傳遞contex到狀態樹終端的task,這個task通常是應用程式與作業系統的IO邊界,像是發出HTTP請求或是資料庫抓取資料。當呼叫完poll()緊接著就是觸發park(),這個方法的作用是將任務掛住並讓出執行緒,於是迴圈在這邊會被暫時停止。接下來當系統發生IO事件時,比如說發出的HTTP請求收到回覆,這時候終端的任務就會透過waker通知runtime要恢復狀態,迴圈再次進行,因此再次調用了poll()詢訪狀態機樹,推進整個非同步程式的進行。
上面大概說明了rust中是如何思考非同步程式的,編譯器在看到async關鍵字時就會將方法編譯成一個隱含的future trait物件,await則是幫助編譯器判定要如何建立類似enum的資料結構來描述方法內部的狀態,某種程度上rust在編譯時期就會把非同步方法的執行順序排序好了。

