
當初對要如何『讓我的機器人自主移動』充滿了問號,因為我從來都沒試著做出一台車過!甚至Ardiuno小車也沒有!
經歷了一番掙扎後,我自己發現了一個很不錯的學習環境,也分享給大家~
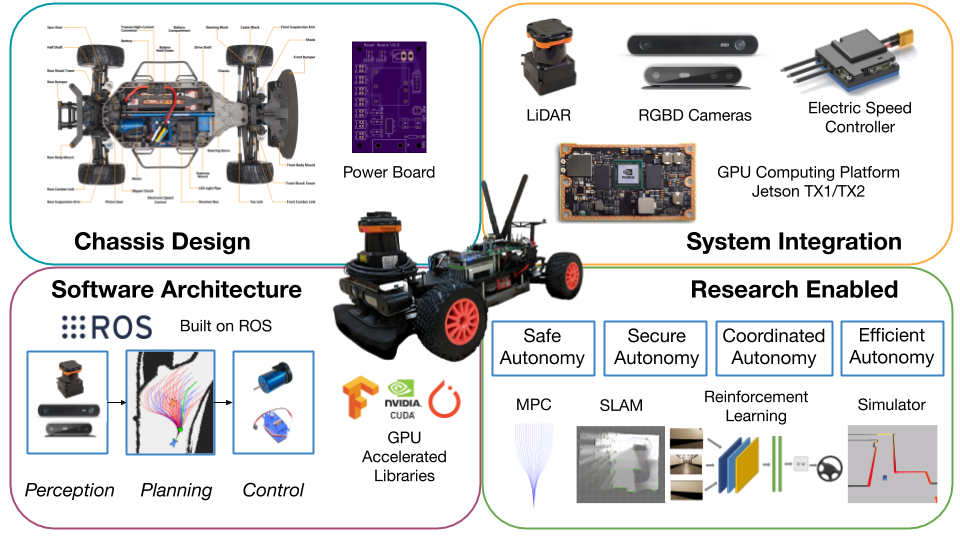
F1TENTH是一個起初由賓州大學成立,後來逐漸擴大的國際社團,包含了研究學生、工程師、自主移動系統愛好者等等,致力於協助更多人學習自主移動機器人~
它們透過提供如何建造一台自走車(含硬體)、如何學習自走車知識、舉辦大型競賽、發表學術研究等四大方式來支持社團的運作。如果有興趣的人可以至它們官網看看,說不定你會和我一樣有發現新大陸的感覺。
還很貼心的是,它們有把教學資源也放上youtube!
它們提供了包含Perception(感知)、Planning(規劃)、Control(控制)等教學環節。自走車的環境是架構在ROS上,不用怕環境架設不對,因為已經提供了docker與gui的配套無痛學習。
就舉Wall following的例子,github中有提供環境與部份程式碼。
我自己也依照我的需求更改了地圖,成果如下: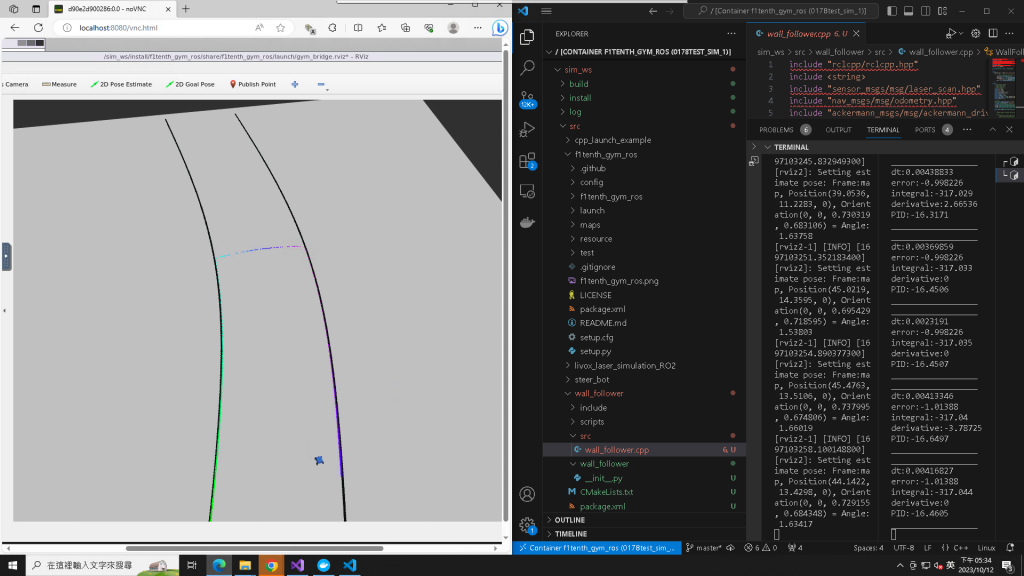
不免俗的要稍微提一下我遇到的那些問題XD
#map parameters
map_path: '/sim_ws/src/f1tenth_gym_ros/maps/tunnel'
map_img_ext: '.png'
F1TENTH的模擬環境可以自己修改一些參數,如地圖可換成自己的.png。
不過要注意的是圖片的位元深度必須為8!!!
我的理解,位元深度影響的是RGB能被電腦紀錄的細緻程度,因為我的地圖都是黑白的,我就忽略了它...
# laserscan parameters
scan_fov: 4.7
scan_beams: 1080
F1TENTH是模擬一個範圍4.7rad(270度)雷射感測器,其光雷射光線束數有1000,我之前想改成更符合我實際設備的角度,不過發生問題,不過因為我只是要模擬看看,沒有一定得改雷射角度,後來就沒解決了。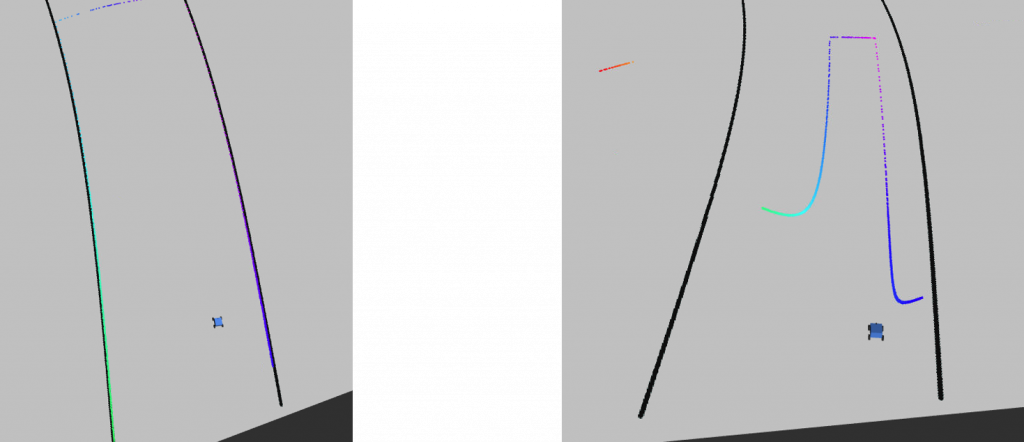
如果有想要自學自走車的話,可以在F1TENTH先找到學習方向!


 iThome鐵人賽
iThome鐵人賽