如果我們要跟一個沒見過貓的朋友敘述貓的長相,我們正常不會說「他左上的第一個像素顏色是什麼」,而是敘述他的眼睛、耳朵、尾巴長怎麼樣。對電腦來說,讓他主動尋找一張影像中重要的部分,我們會稱之為特徵工程 (feature engineering),他的目標是從原始的像素數據中,提取出這些有意義、有鑑別度的資訊。
一個好的特徵,常會滿足以下幾個條件
不變性 (invariant): 這是最重要的一點。無論物體在影像中如何移動(平移)、放大縮小(尺度變化)、旋轉,甚至在不同光照下,一個好的特徵都應該能被穩定地偵測出來。
局部性 (locality): 特徵應該是局部的。這代表它是基於像素周圍的一個小區域計算出來的,而不是整張影像。這使得特徵對於遮擋或背景混亂的情況更具魯棒性。
鑑別度 (distinctiveness): 特徵必須是獨特的,讓人可以輕易地將它與其他特徵區分開來。例如,牆壁上一片白中的某個點就沒有鑑別度,但書本的一個角就很有鑑別度。
數量 (quantity): 一張影像中應該能偵測出足夠數量的特徵,以便能夠完整地描述影像內容。但數量也不宜過多,以免造成過大的計算負擔。
而角點 (corner) 就是一種非常優秀的特徵,它有著很高的鑑別度,並且在物體旋轉時能保持穩定,非常符合我們的需求。接下來,我們就來學習兩種最經典的角點偵測演算法。
假設我們在影像上放置一個小小的滑動窗口 ,那麼 Harris 角點偵測演算法是基於下面這三點
如果這個窗口在一片平坦的區域(如牆面),那麼無論你將窗口往哪個方向移動,窗口內的內容幾乎沒有變化。
如果窗口在一個邊緣上,當你沿著邊緣方向移動時,內容變化不大;但若垂直於邊緣移動,內容就會有劇烈變化。
如果窗口在一個角點上,那麼無論你朝哪個方向移動,窗口內的內容都會發生顯著的變化。
Harris 演算法基於這些事情,定義出了一個分數 R,公式為

其中 M 是一個 2*2 的梯度矩陣,k 為一個常數。這時 R 的值會有三種情況
R > 0:代表是角點
R < 0:代表是邊緣
|R| ≒ 0:代表是平坦的區域
在 OpenCV,我們可以用 cv2.cornerHarris() 來簡單實現 Harris 演算法。
Shi-Tomasi 演算法改進了 Harris 演算法,如果是一個好的角點,那梯度矩陣 M 的兩個特徵值 λ1 跟 λ2 應該都要很大。因此我們只要取特徵值的較小的那一個
如果他大於設定的閾值的話,那代表他是一個好的角點。
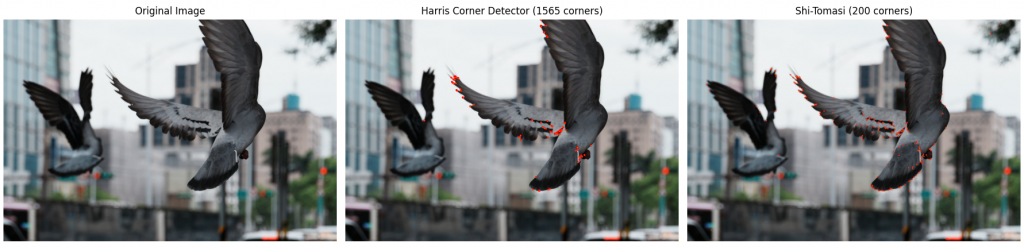
在 OpenCV 內,Harris 跟 Shi-Tomasi 演算法分別可以以下程式碼實作
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 讀取圖片,並轉換成灰階
img_bgr = cv2.imread('bird.jpg')
img_gray = cv2.cvtColor(img_bgr, cv2.COLOR_BGR2GRAY)
img_gray_float = np.float32(img_gray)
# Harris 角點偵測
harris_dst = cv2.cornerHarris(img_gray_float, 2, 3, 0.04)
harris_dst = cv2.dilate(harris_dst, None)
img_harris = img_bgr.copy()
threshold = 0.01 * harris_dst.max()
harris_points = np.where(harris_dst > threshold)
for y, x in zip(harris_points[0], harris_points[1]):
cv2.circle(img_harris, (x, y), 5, (0, 0, 255), 2)
cv2.circle(img_harris, (x, y), 2, (0, 255, 255), -1)
# Shi-Tomasi 角點偵測
corners = cv2.goodFeaturesToTrack(img_gray,
maxCorners=200,
qualityLevel=0.01,
minDistance=8)
img_shi_tomasi = img_bgr.copy()
if corners is not None:
corners = corners.astype(int)
for i in corners:
x, y = i.ravel()
cv2.circle(img_shi_tomasi, (x, y), 5, (0, 0, 255), 2)
cv2.circle(img_shi_tomasi, (x, y), 2, (0, 255, 255), -1)
# 顯示結果
plt.figure(figsize=(18, 6))
plt.subplot(1, 3, 1)
plt.imshow(cv2.cvtColor(img_bgr, cv2.COLOR_BGR2RGB))
plt.title('Original Image')
plt.axis('off')
plt.subplot(1, 3, 2)
plt.imshow(cv2.cvtColor(img_harris, cv2.COLOR_BGR2RGB))
plt.title(f'Harris Corner Detector ({len(harris_points[0])} corners)')
plt.axis('off')
plt.subplot(1, 3, 3)
plt.imshow(cv2.cvtColor(img_shi_tomasi, cv2.COLOR_BGR2RGB))
plt.title(f'Shi-Tomasi ({len(corners) if corners is not None else 0} corners)')
plt.axis('off')
plt.tight_layout()
plt.show()
Harris 和 Shi-Tomasi 都是優秀的角點偵測器,但它們有一個共同的弱點:它們對尺度變化很敏感。如果把相機拉遠,原本清晰的角點可能會變得模糊,導致偵測失敗。
為了解決這個問題,研究人員提出在「尺度空間 (scale space)」中尋找特徵。高斯差 (Difference of Gaussian, DoG) 就是一種高效實現尺度空間特徵偵測的方法。
它的原理是:
對原始影像進行不同程度的高斯濾波,產生一系列模糊程度不同的影像(構成尺度空間)。
將相鄰的兩張模糊影像相減。
在這些相減後的差分影像中,尋找局部極值。
這些極值點,就是對尺度變化具有不變性的特徵點,通常被稱為「斑點 (blobs)」。斑點可以看作是角點的一種廣義形式。DoG 不僅是 SIFT 演算法中特徵偵測的基礎,其本身也是一種非常有效的特徵偵測器。


 iThome鐵人賽
iThome鐵人賽