
上篇簡單的介紹了一下,整體架構的部分!? 突然發現好像沒有講得很深XD
本文開始,將深入Debug Module(DM)的部分進行探討!
未來系列的文章中將以RISC-V External Debug Support 0.13為主,並將相關的實作一併附上,希望能夠引導讀者了解底層系統除錯架構的設計!一起加入Debugger的世界吧
Debug Module是整個架構的中心,負責處理來自外部的訊號,
以及處理內部Hart(RISC-V中hardware thread的最小單位)的狀態訊號、狀態控制等等。
主要提供以下功能:
以上內容翻譯自RISC-V External Debug Support 0.13,幾本上整個Debug Module就是圍繞在實現上述功能上,並提供一系列相關Registers讓外部Debug Translator(忘記的話請參考上篇Day 07: RISC-V Introduction)控制!
另外一個比較爭議的地方是,Program Buffer雖然在Spec.為定位為可選的部分,不過實際上為了能夠對Memory進行相關操作,還是必須要存在!?
在目前RISC-V OpenOCD的實現中,Program Buffer只少需要2-Words,詳細資料可以參考:
OpenOCD should support targets that don't implement a program buffer #112
或是至少需要System Bus相關操作的能力來對Memory進行相關操作!!
主要功能為負責將Debug Transport Module(Bus Master)所接收到的訊號轉發至Debug Module(Bus Slave)中!
實作上而言,可以是簡單的Master-to-Slave Bus或是可以用TileLink(SiFive所提供的interface bus IP)、AMBA APB(Advanced
Peripheral Bus)等等!
根據Spec.中的定義,DMI中的Address切成兩部分,0 ~ 6 address bits保留給DM使用,其餘的地方,可供其他Debug Device或是其他用途!
另外,在0 ~ 6 address bits保留給DM使用的地方,則切割成兩部分:
詳見下圖:
---引用自RISC-V External Debug Support 0.13
Debug Module Registers的部分會留待後面文章中再詳細解析!
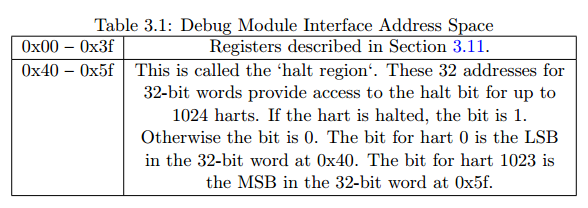
Halt region,這部分比較特別一點,在其中的每個Bits分別代表一個Hart的狀態:
參考下圖的範例: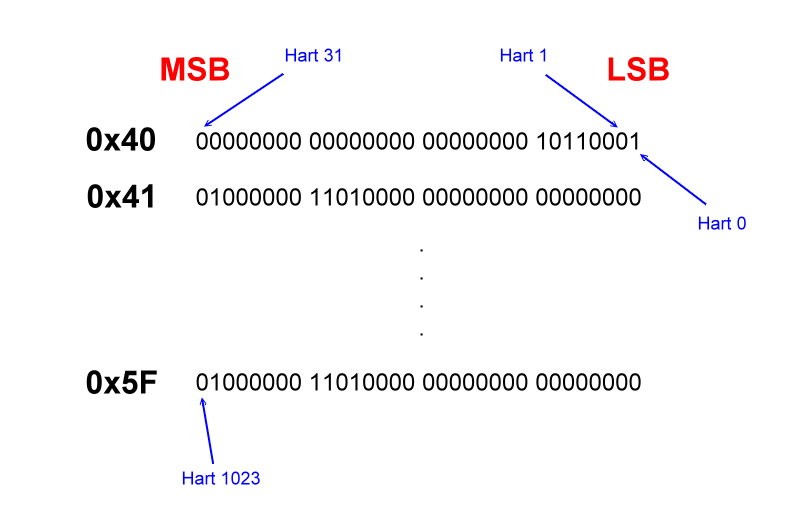
所以在整個Address Space的設計上,總共支援(0x5f - 0x40 + 1) * 32 = 1024個Harts
以上是Spec.的部分,接下來要介紹到DMI Access操作(Read/Write)的實作!
主要分成以下三個部分:
首先是DMI Read Operation,以下程式碼請參考src/target/riscv/riscv-013.c
static uint64_t dmi_read(struct target *target, uint16_t address)
{
select_dmi(target);
dmi_status_t status;
uint16_t address_in;
unsigned i = 0;
// This first loop ensures that the read request was actually sent
// to the target. Note that if for some reason this stays busy,
// it is actually due to the previous dmi_read or dmi_write.
for (i = 0; i < 256; i++) {
status = dmi_scan(target, NULL, NULL, DMI_OP_READ, address, 0,
false);
if (status == DMI_STATUS_BUSY) {
increase_dmi_busy_delay(target);
} else if (status == DMI_STATUS_SUCCESS) {
break;
} else {
LOG_ERROR("failed read from 0x%x, status=%d", address, status);
break;
}
}
if (status != DMI_STATUS_SUCCESS) {
LOG_ERROR("Failed read from 0x%x; status=%d", address, status);
abort();
}
// This second loop ensures that we got the read
// data back. Note that NOP can result in a 'busy' result as well, but
// that would be noticed on the next DMI access we do.
uint64_t value;
for (i = 0; i < 256; i++) {
status = dmi_scan(target, &address_in, &value, DMI_OP_NOP, address, 0,
false);
if (status == DMI_STATUS_BUSY) {
increase_dmi_busy_delay(target);
} else if (status == DMI_STATUS_SUCCESS) {
break;
} else {
LOG_ERROR("failed read (NOP) at 0x%x, status=%d", address, status);
break;
}
}
if (status != DMI_STATUS_SUCCESS) {
LOG_ERROR("Failed read (NOP) from 0x%x; value=0x%" PRIx64 ", status=%d",
address, value, status);
abort();
}
return value;
}
第一個Loop是將資料"敲"進去DMI中,第二個Loop是將NOP敲入DMI中,並將資料"擠出"DMI!
之後文章中如果有提到JTAG的部分,還會再做詳細的介紹!
以下是相關的Log:
Debug: 505 654 riscv-013.c:237 scan(): 41b r 00000000 @11 -> + 00000000 @00
Debug: 506 654 riscv-013.c:237 scan(): 41b - 00000000 @11 -> + 00030c82 @11
第一行將OP_READ和Register的Address 0x11敲入DMI中;
第二行則是將OP_NOP敲入DMI中,並將Data 0x00030c82從中讀取出來
再來是DMI Write Operation,以下程式碼請參考src/target/riscv/riscv-013.c
static void dmi_write(struct target *target, uint16_t address, uint64_t value)
{
select_dmi(target);
dmi_status_t status = DMI_STATUS_BUSY;
unsigned i = 0;
// The first loop ensures that we successfully sent the write request.
for (i = 0; i < 256; i++) {
status = dmi_scan(target, NULL, NULL, DMI_OP_WRITE, address, value,
address == DMI_COMMAND);
if (status == DMI_STATUS_BUSY) {
increase_dmi_busy_delay(target);
} else if (status == DMI_STATUS_SUCCESS) {
break;
} else {
LOG_ERROR("failed write to 0x%x, status=%d", address, status);
break;
}
}
if (status != DMI_STATUS_SUCCESS) {
LOG_ERROR("Failed write to 0x%x;, status=%d",
address, status);
abort();
}
// The second loop isn't strictly necessary, but would ensure that
// the write is complete/ has no non-busy errors before returning from this function.
for (i = 0; i < 256; i++) {
status = dmi_scan(target, NULL, NULL, DMI_OP_NOP, address, 0,
false);
if (status == DMI_STATUS_BUSY) {
increase_dmi_busy_delay(target);
} else if (status == DMI_STATUS_SUCCESS) {
break;
} else {
LOG_ERROR("failed write (NOP) at 0x%x, status=%d", address, status);
break;
}
}
if (status != DMI_STATUS_SUCCESS) {
LOG_ERROR("failed to write (NOP) 0x%" PRIx64 " to 0x%x; status=%d", value, address, status);
abort();
}
}
類似DMI Read,
第一個Loop是將資料"敲"進去DMI中,第二個Loop是將NOP敲入DMI中,確認是否完成動作!
以下是相關的Log:
Debug: 509 655 riscv-013.c:237 scan(): 41b w 80000001 @10 -> + 00000000 @00
Debug: 510 656 riscv-013.c:237 scan(): 41b - 00000000 @10 -> + 80000001 @10
最後是核心DMI Scan(Exec)的部分,
首先介紹DMI傳輸的Format,見下圖:

---引用自RISC-V External Debug Support 0.13
主要分成三個部分:
以下程式碼請參考src/target/riscv/riscv-013.c
/**
* exec: If this is set, assume the scan results in an execution, so more
* run-test/idle cycles may be required.
*/
static dmi_status_t dmi_scan(struct target *target, uint16_t *address_in,
uint64_t *data_in, dmi_op_t op, uint16_t address_out, uint64_t data_out,
bool exec)
{
riscv013_info_t *info = get_info(target);
uint8_t in[8] = {0};
uint8_t out[8];
struct scan_field field = {
.num_bits = info->abits + DTM_DMI_OP_LENGTH + DTM_DMI_DATA_LENGTH,
.out_value = out,
.in_value = in
};
assert(info->abits != 0);
buf_set_u64(out, DTM_DMI_OP_OFFSET, DTM_DMI_OP_LENGTH, op);
buf_set_u64(out, DTM_DMI_DATA_OFFSET, DTM_DMI_DATA_LENGTH, data_out);
buf_set_u64(out, DTM_DMI_ADDRESS_OFFSET, info->abits, address_out);
/* Assume dbus is already selected. */
jtag_add_dr_scan(target->tap, 1, &field, TAP_IDLE);
int idle_count = info->dmi_busy_delay;
if (exec)
idle_count += info->ac_busy_delay;
if (idle_count) {
jtag_add_runtest(idle_count, TAP_IDLE);
}
int retval = jtag_execute_queue();
if (retval != ERROR_OK) {
LOG_ERROR("dmi_scan failed jtag scan");
return DMI_STATUS_FAILED;
}
if (data_in) {
*data_in = buf_get_u64(in, DTM_DMI_DATA_OFFSET, DTM_DMI_DATA_LENGTH);
}
if (address_in) {
*address_in = buf_get_u32(in, DTM_DMI_ADDRESS_OFFSET, info->abits);
}
dump_field(&field);
return buf_get_u32(in, DTM_DMI_OP_OFFSET, DTM_DMI_OP_LENGTH);
}
主要提醒一下:
這邊的out指的是OpenOCD出(out)到Target端;
in指的是從Target得(in)到OpenOCD端!
這邊主要是講解Target的狀態控制,這要分成以下三部分:
分別對應RISC-V External Debug Support 0.13中的3.2 Reset Control和3.4 Run Control!
在Spec.中的Reset分成兩種:
另外需要注意一點,ndmreset中,如果對DMI進行相關操作,DMI並不保證操作能夠正確執行,同時這個行為是Undefined behavior!!
這版的Spec.中又多出了一項設計--"havereset state bit",
當Hart如果有進行過Reset,則該Bit會自動拉成1(比如說: Watchdog做Reset)!
Debug Module(DM)中有一個用來Target狀態控制的Register: Debug Module Control (dmcontrol, at 0x10),裡面包含三種用來做狀態的Bits:
OpenOCD可藉由設定 這三個Bits來達到Target狀態控制的目的!
簡單介紹到這邊,下面直接看實作的部分
在OpenOCD,Reset的流程主要分成兩步驟:
首先是Assert reset的部分,以下程式碼請參考src/target/riscv/riscv-013.c
static int assert_reset(struct target *target)
{
RISCV_INFO(r);
select_dmi(target);
uint32_t control_base = set_field(0, DMI_DMCONTROL_DMACTIVE, 1);
if (target->rtos) {
....省略不放上來!
} else {
// Reset just this hart.
uint32_t control = set_field(control_base, DMI_DMCONTROL_HARTSEL,
r->current_hartid);
control = set_field(control, DMI_DMCONTROL_HALTREQ,
target->reset_halt ? 1 : 0); ///譯註1: 這邊判斷是否需要haltreq (halt request)
control = set_field(control, DMI_DMCONTROL_HARTRESET, 1);
dmi_write(target, DMI_DMCONTROL, control);
/// 譯註2: 判斷hartreset是否能夠成功被寫入!
// Read back to check if hartreset is supported.
uint32_t rb = dmi_read(target, DMI_DMCONTROL);
if (!get_field(rb, DMI_DMCONTROL_HARTRESET)) {
// Use ndmreset instead. That will reset the entire device, but
// that's probably what OpenOCD wants anyway.
control = set_field(control, DMI_DMCONTROL_HARTRESET, 0);
control = set_field(control, DMI_DMCONTROL_NDMRESET, 1);
dmi_write(target, DMI_DMCONTROL, control);
}
}
target->state = TARGET_RESET;
return ERROR_OK;
}
還記得Day 04: OpenOCD常用Commands簡介中,OpenOCD提供以下幾種Reset的方式:
另外上面有提到,"hartreset (hart reset)"並不一定有被硬體實做出來,因此這邊的做法是先「試試看」能否正確的執行"hartreset",如果不行,還記的"# 2.1 Reset Control"中有提到的ndmreset,也同樣可以達到Target進入Reset狀態的功能!?
詳細過程可以參考"譯註2"的地方!
再來是Deassert reset的部分,以下程式碼請參考src/target/riscv/riscv-013.c
static int deassert_reset(struct target *target)
{
RISCV_INFO(r);
RISCV013_INFO(info);
select_dmi(target);
LOG_DEBUG("%d", r->current_hartid);
// Clear the reset, but make sure haltreq is still set
uint32_t control = 0;
control = set_field(control, DMI_DMCONTROL_HALTREQ, target->reset_halt ? 1 : 0);
control = set_field(control, DMI_DMCONTROL_HARTSEL, r->current_hartid);
control = set_field(control, DMI_DMCONTROL_DMACTIVE, 1);
dmi_write(target, DMI_DMCONTROL, control);
uint32_t dmstatus;
int dmi_busy_delay = info->dmi_busy_delay;
time_t start = time(NULL);
if (target->reset_halt) {
///Part 1: Reset halt
LOG_DEBUG("Waiting for hart to be halted.");
do {
dmstatus = dmi_read(target, DMI_DMSTATUS);
if (time(NULL) - start > riscv_reset_timeout_sec) {
LOG_ERROR("Hart didn't halt coming out of reset in %ds; "
"dmstatus=0x%x; "
"Increase the timeout with riscv set_reset_timeout_sec.",
riscv_reset_timeout_sec, dmstatus);
return ERROR_FAIL;
}
target->state = TARGET_HALTED;
} while (get_field(dmstatus, DMI_DMSTATUS_ALLHALTED) == 0);
///譯註1: 確認Target進入Halted後,將haltreq放掉(清成0)
control = set_field(control, DMI_DMCONTROL_HALTREQ, 0);
dmi_write(target, DMI_DMCONTROL, control);
} else {
///Part 2: Reset run
LOG_DEBUG("Waiting for hart to be running.");
do {
dmstatus = dmi_read(target, DMI_DMSTATUS);
if (get_field(dmstatus, DMI_DMSTATUS_ANYHALTED) ||
get_field(dmstatus, DMI_DMSTATUS_ANYUNAVAIL)) {
LOG_ERROR("Unexpected hart status during reset. dmstatus=0x%x",
dmstatus);
return ERROR_FAIL;
}
if (time(NULL) - start > riscv_reset_timeout_sec) {
LOG_ERROR("Hart didn't run coming out of reset in %ds; "
"dmstatus=0x%x; "
"Increase the timeout with riscv set_reset_timeout_sec.",
riscv_reset_timeout_sec, dmstatus);
return ERROR_FAIL;
}
} while (get_field(dmstatus, DMI_DMSTATUS_ALLRUNNING) == 0);
target->state = TARGET_RUNNING;
}
info->dmi_busy_delay = dmi_busy_delay;
return ERROR_OK;
}
主要分成"Part 1: Reset halt"、"Part 2: Reset run"這兩部分,
在Part 1: Reset halt中,當確認Target進入Halted後,即可將haltreq放掉(清成0),請參考"譯註1"的部分!
在Target Resume(Run)的部分也類似,以下程式碼請參考src/target/riscv/riscv-013.c
static void riscv013_step_or_resume_current_hart(struct target *target, bool step)
{
....省略不放上來!
/* Issue the resume command, and then wait for the current hart to resume. */
uint32_t dmcontrol = dmi_read(target, DMI_DMCONTROL);
dmcontrol = set_field(dmcontrol, DMI_DMCONTROL_RESUMEREQ, 1);
dmi_write(target, DMI_DMCONTROL, dmcontrol);
for (size_t i = 0; i < 256; ++i) {
///譯註: 確認Target是否完成Resume
usleep(10);
uint32_t dmstatus = dmi_read(target, DMI_DMSTATUS);
if (get_field(dmstatus, DMI_DMSTATUS_ALLRESUMEACK) == 0)
continue;
if (step && get_field(dmstatus, DMI_DMSTATUS_ALLHALTED) == 0)
continue;
dmcontrol = set_field(dmcontrol, DMI_DMCONTROL_RESUMEREQ, 0);
dmi_write(target, DMI_DMCONTROL, dmcontrol);
return;
}
....省略不放上來!
}
主要將resumereq拉上,並持續確認直到Target順利進入Resume後,
將resumereq恢復成0,再離開這個Loop!
以上就是Debug Module Overview的部分!
Debug Module整份資料要介紹的東西比想像中的還要多很多,本來預計一篇就要解決,
看起來目前應該是會分成(上)、(中)、(下)至少三篇!!
預計明天的主題會介紹整個Debug Moduel核心功能:

