進行視角轉換工作
def unwarp(img, src, dst):
h,w = img.shape[:2]
# use cv2.getPerspectiveTransform() to get M, the transform matrix, and Minv, the inverse
M = cv2.getPerspectiveTransform(src, dst)
Minv = cv2.getPerspectiveTransform(dst, src)
# use cv2.warpPerspective() to warp your image to a top-down view
warped = cv2.warpPerspective(img, M, (w,h), flags=cv2.INTER_LINEAR)
return warped, M, Minv
print('...')
h,w = exampleImg_undistort.shape[:2]
# define source and destination points for transform
src = np.float32([(575,464),
(707,464),
(258,682),
(1049,682)])
dst = np.float32([(450,0),
(w-450,0),
(450,h),
(w-450,h)])
exampleImg_unwarp, M, Minv = unwarp(exampleImg_undistort, src, dst)
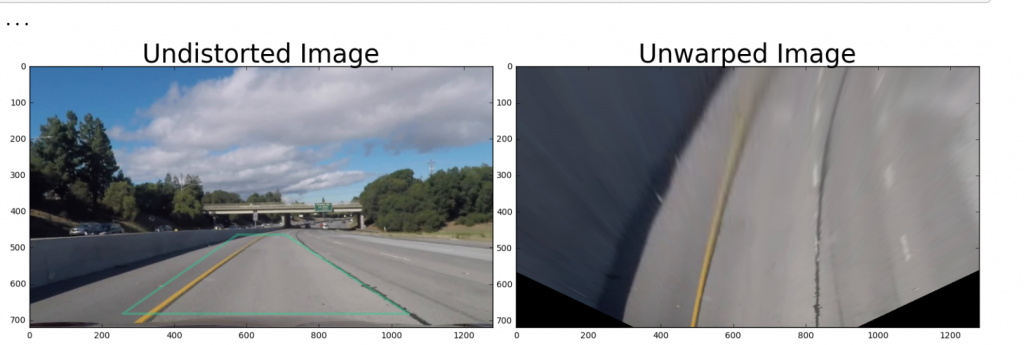
# Visualize unwarp
f, (ax1, ax2) = plt.subplots(1, 2, figsize=(20,10))
f.subplots_adjust(hspace = .2, wspace=.05)
ax1.imshow(exampleImg_undistort)
x = [src[0][0],src[2][0],src[3][0],src[1][0],src[0][0]]
y = [src[0][1],src[2][1],src[3][1],src[1][1],src[0][1]]
ax1.plot(x, y, color='#33cc99', alpha=0.4, linewidth=3, solid_capstyle='round', zorder=2)
ax1.set_ylim([h,0])
ax1.set_xlim([0,w])
ax1.set_title('Undistorted Image', fontsize=30)
ax2.imshow(exampleImg_unwarp)
ax2.set_title('Unwarped Image', fontsize=30)
print('...')
[1]jeremy-shannon/CarND-Advanced-Lane-Lines@github

