參考資料:
1. roslibjsTutorialsBasicRosFunctionality
2. ROS筆記 - 機器人模型URDF
3. urdf/Tutorials
4. 古月居ROS探索总结(二十三)——解读URDF
• ROSbridge解說
○ 當遇到不同平台(windows、Ubuntu、Android…)時,只要讓他們能夠連接到同一個Master就可以溝通
○ 利用JSON API的方式讓沒有安裝ROS的系統也能使用ROS
○ 是一個package
因此:
1. 先安裝包: sudo apt-get install ros-kinetic-rosbridge-server
2. 執行websocket: roslaunch rosbridge_server rosbridge_websocket.launch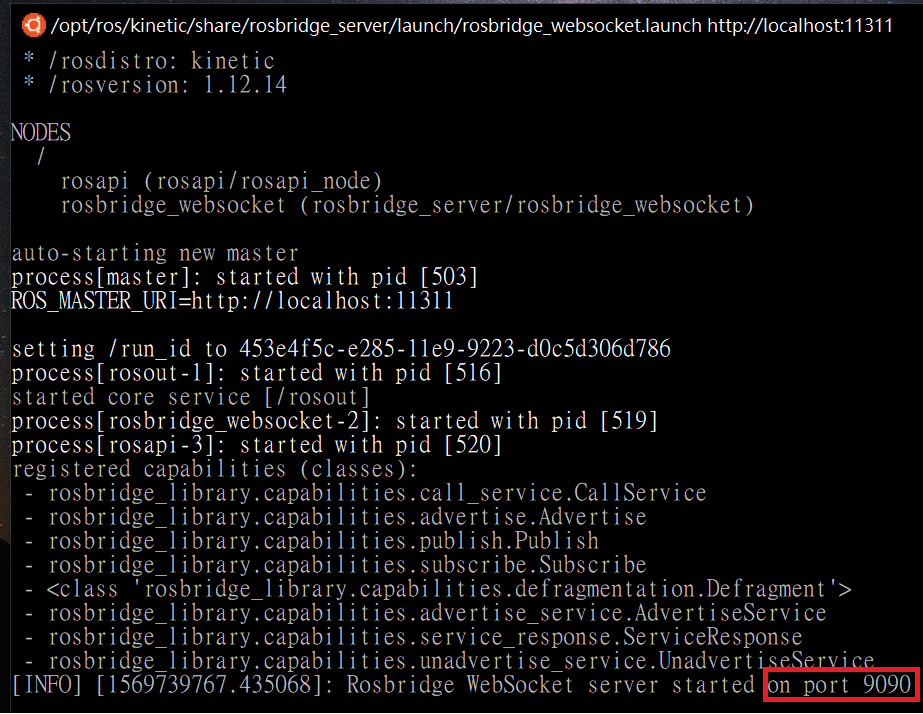
3. 然後建立一個文檔貼上 The HTML Code內容儲存>改檔名副檔名>開啟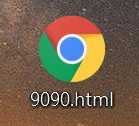
4. 玩玩看
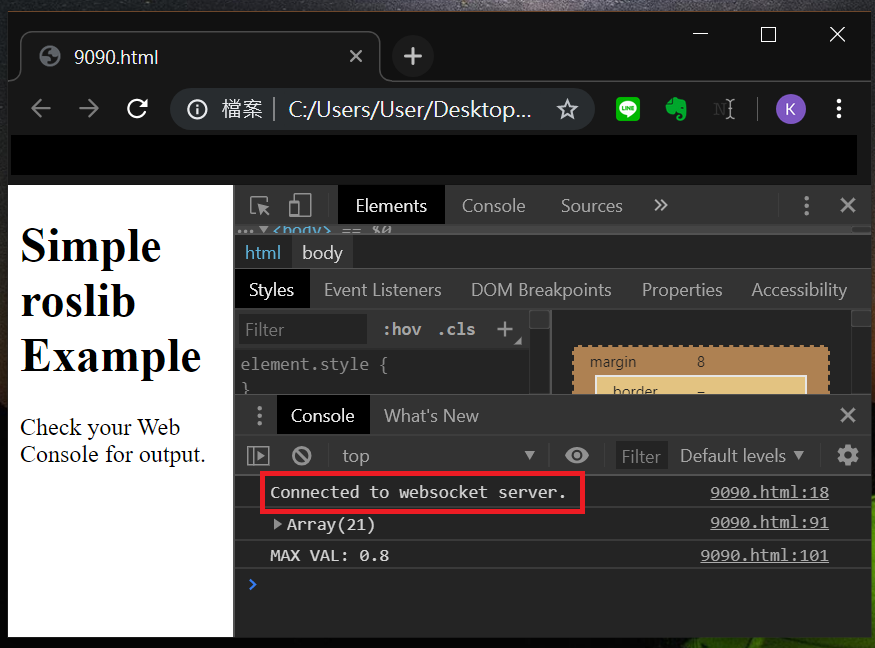
在終端打上: rostopic pub /listener std_msgs/String "Hello, World",網頁就會接收到Hello, World
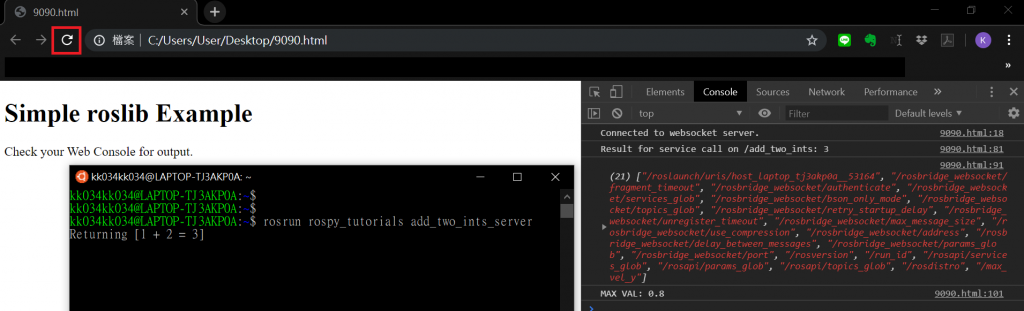
在終端打上:rostopic echo /cmd_vel //從客端Publish到主機端rosrun rospy_tutorials add_two_ints_server //在客端定義數字,呼叫主機端
網頁重新整理後,可以在終端看到結果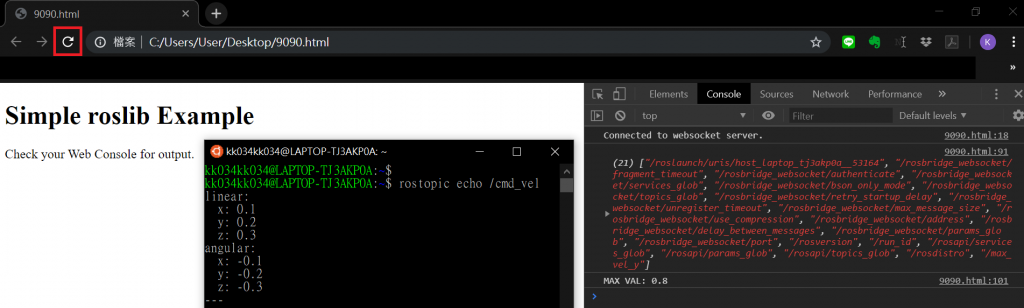
或你想玩ROS進階學習(七) - rosbrige_suite
有很多前端可以與Rosbridge互動,包括websocket服務器;Rosbridge_suite是一個複合的功能包,包含了rosbridge,各種前端封裝包,和一個幫助包。
• Robot Models︰URDF(Unified Robot Description Format)解說
○ 中文翻譯: 統一機器人描述格式
○ 是一種特殊的XML文件格式,用來描述機器人的模型
urdfTutorialsCreate your own urdf file步驟:
1. 心中要有結構樹(類似下圖)
2. 定義那些LINK、JOINT,包括名稱、尺寸
創建文檔(可命名為my_robot.urdf)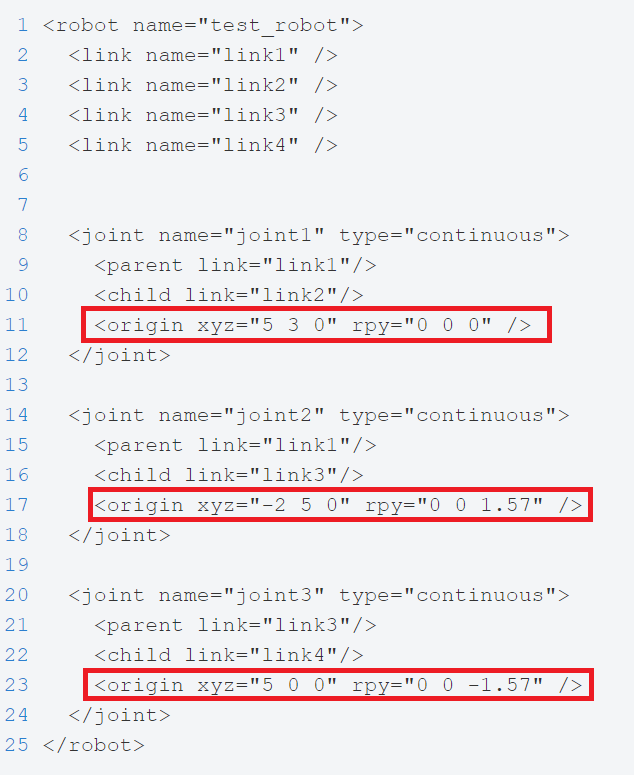
3. 完成運動學,例如: 繞某軸轉動之類的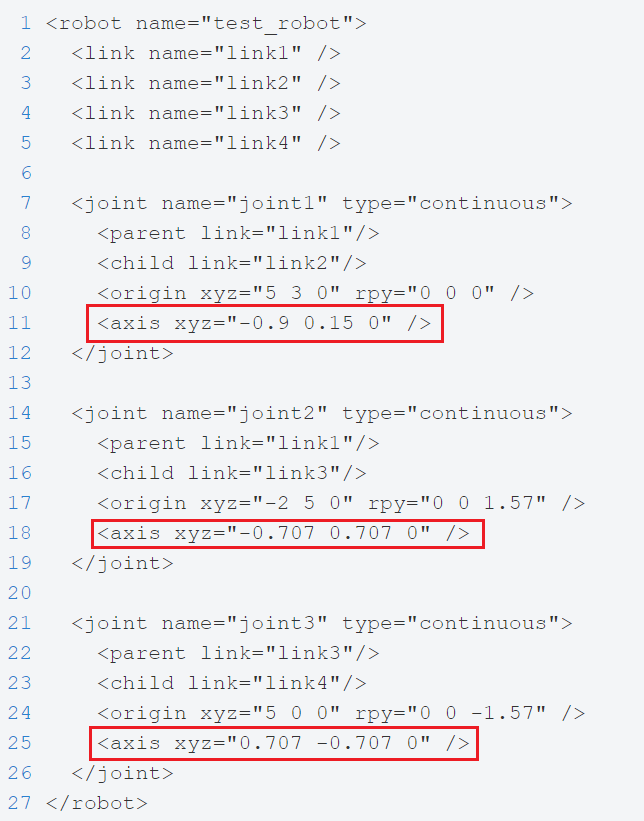
ROS 為用戶提供了一個檢查URDF語法的工具: sudo apt-get install liburdfdom-tools,然後執行check_urdf my_robot.urdf,或你還想urdf_to_graphiz my_robot.urdf讓URDF 圖像化顯示出來。
#以上大致會了之後
官網要我們嘗試Understanding the PR2 Robot Description
#補充
SolidWorks to URDF Exporter
在 solidworks 中我們使用官方提供的工具SW2URDF來將我們設計的機器人轉化成URDF格式,再匯入GAZEBO進行模擬。

