昨天講了一些事前介紹,相信大家應該都已經做好了準備,那就話不多說,今天要介紹的是筆者所使用的一些ROS基本環境設置。
由於ROS為Linux架構的作業系統,因此筆者就選擇了最多人用且十分好上手的Ubuntu作為ROS的開發平台。但筆者手上也只有Windows架構的電腦,因此就需要安裝虛擬機來運行其他的作業系統。現在網路上有各式各樣的虛擬機可以使用,基本上隨便挑一個都不會有太大的問題,而筆者是選擇常見的VMware虛擬機。VMware有分付費版的VMware Workstation和免費的VMware Workstation player,筆者是使用免費版的,使用起來很穩定也很順暢,至少筆者很少遇到當機或是閃退的情形,如果沒有特別的喜好,可以參考看看,官方網站在這邊。
下載安裝之後,接著便是安裝Ubuntu作業系統到虛擬機上啦,首先,先從Ubuntu的官方網站下載,發行版選擇Ubuntu桌面版本,接著是Ubuntu版本的選擇,由於當時最新的版本是18.04LTS,因此筆者是安裝該版,若是有更新的版本可以使用,就下載最新版的,相信差異應該不大。最後電腦架構就根據個人的電腦去做選擇就可以了。下面提供筆者使用的懶人包。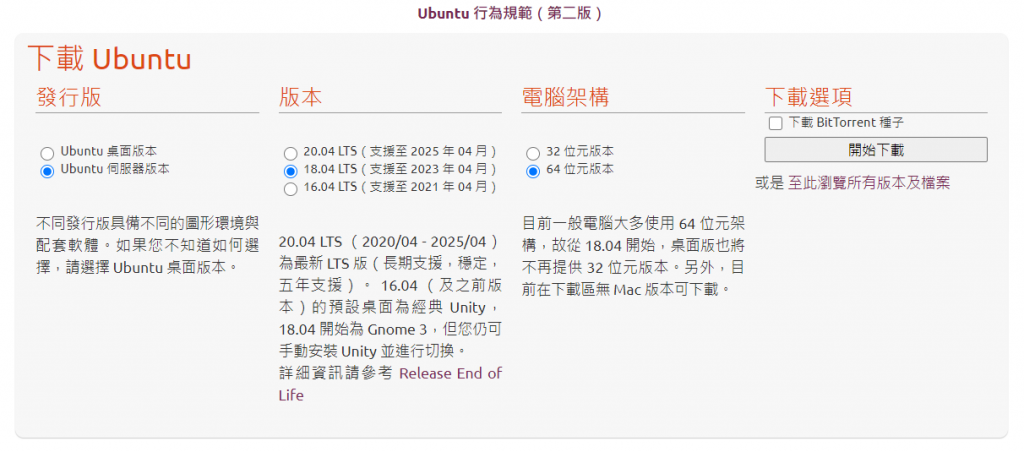
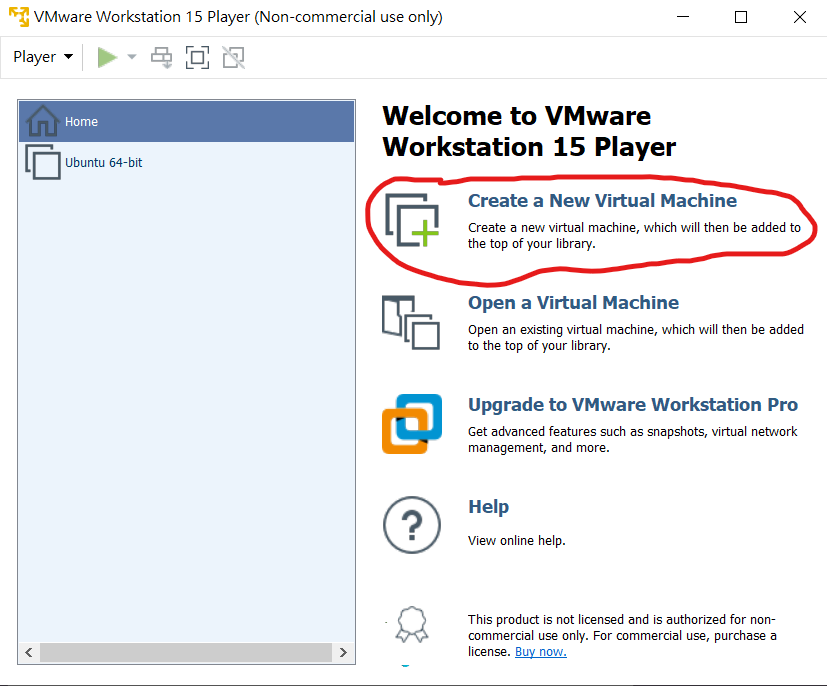
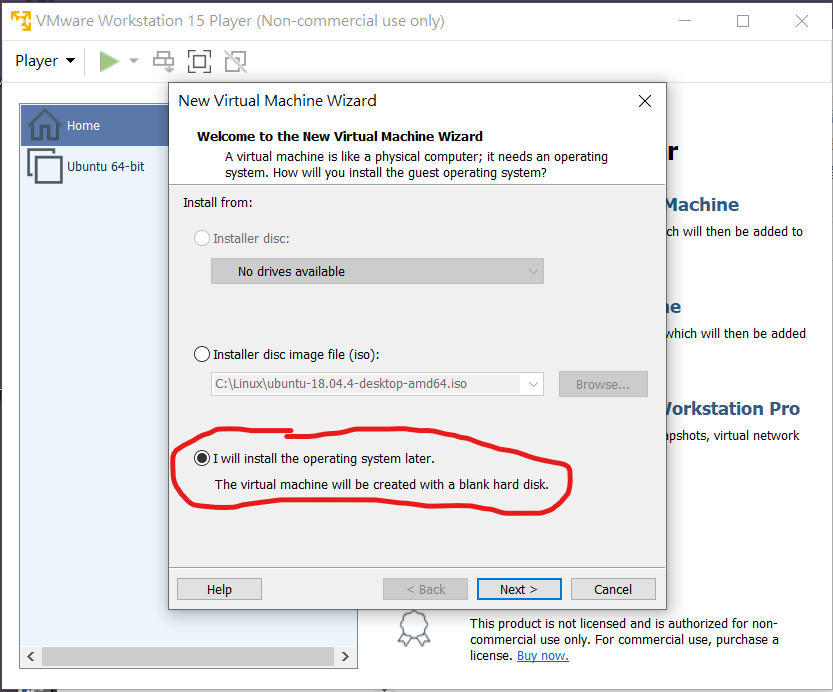
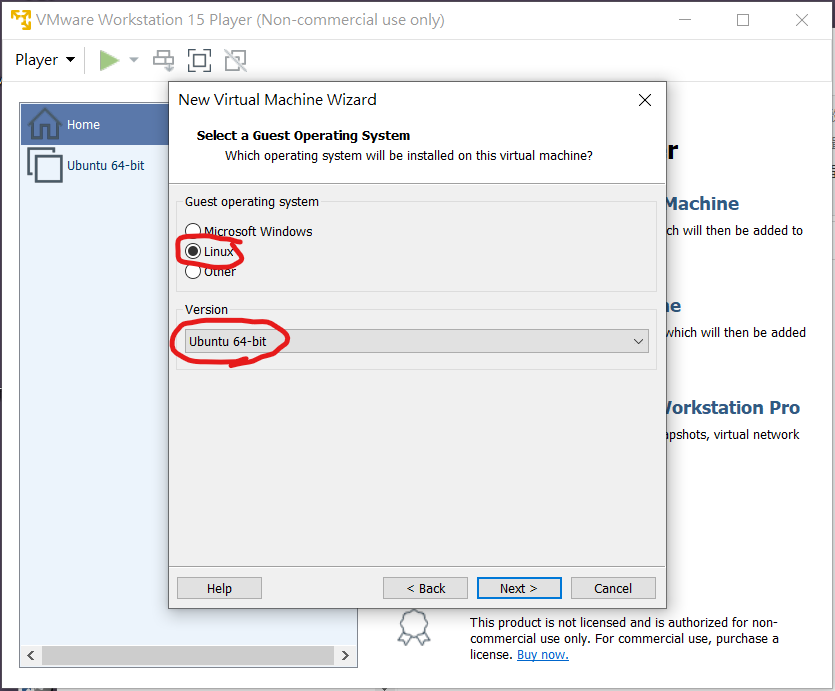
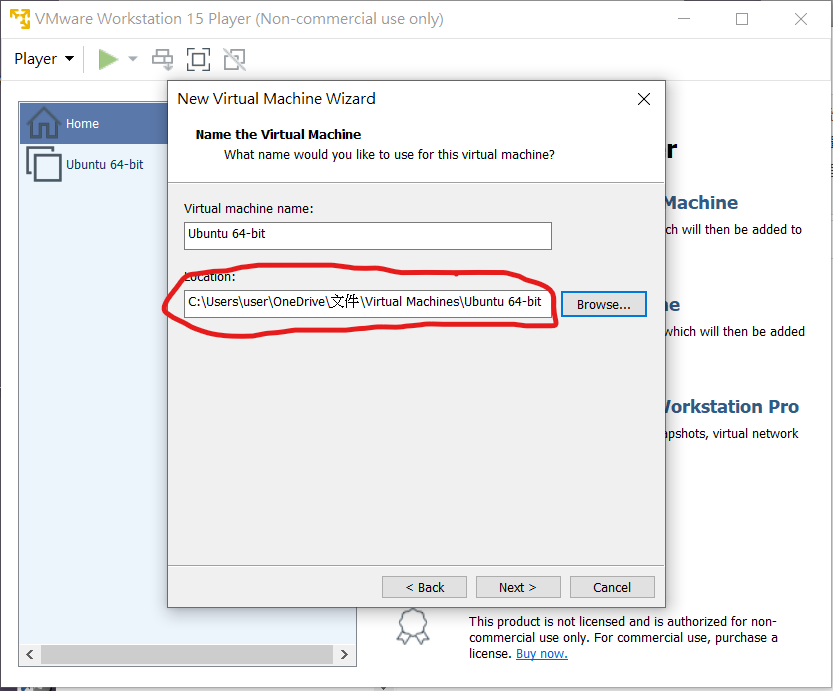
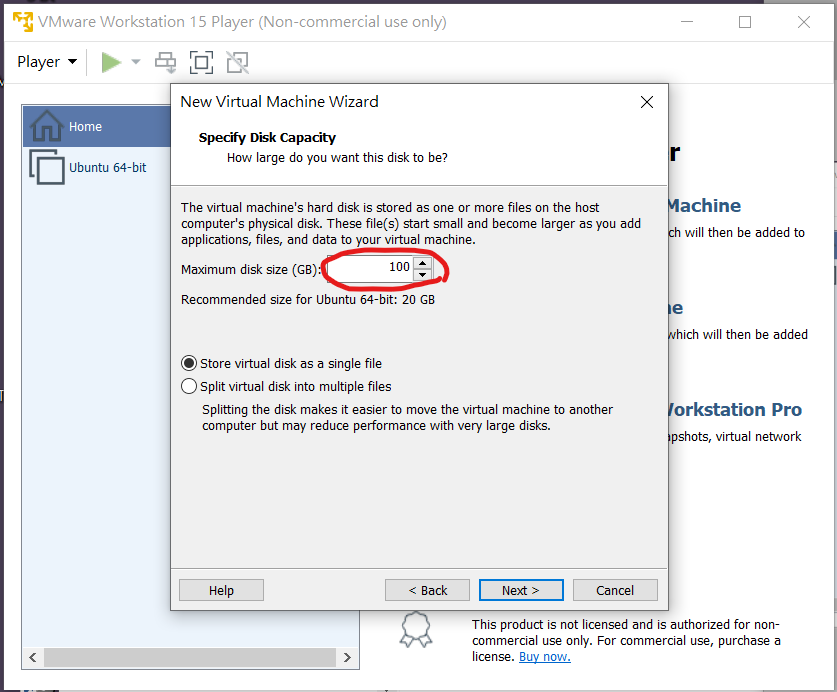
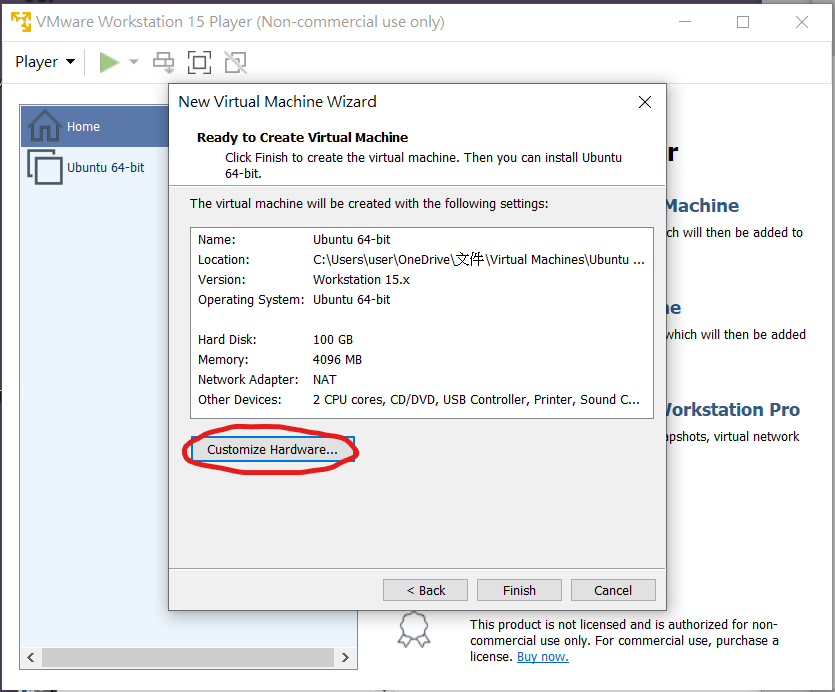
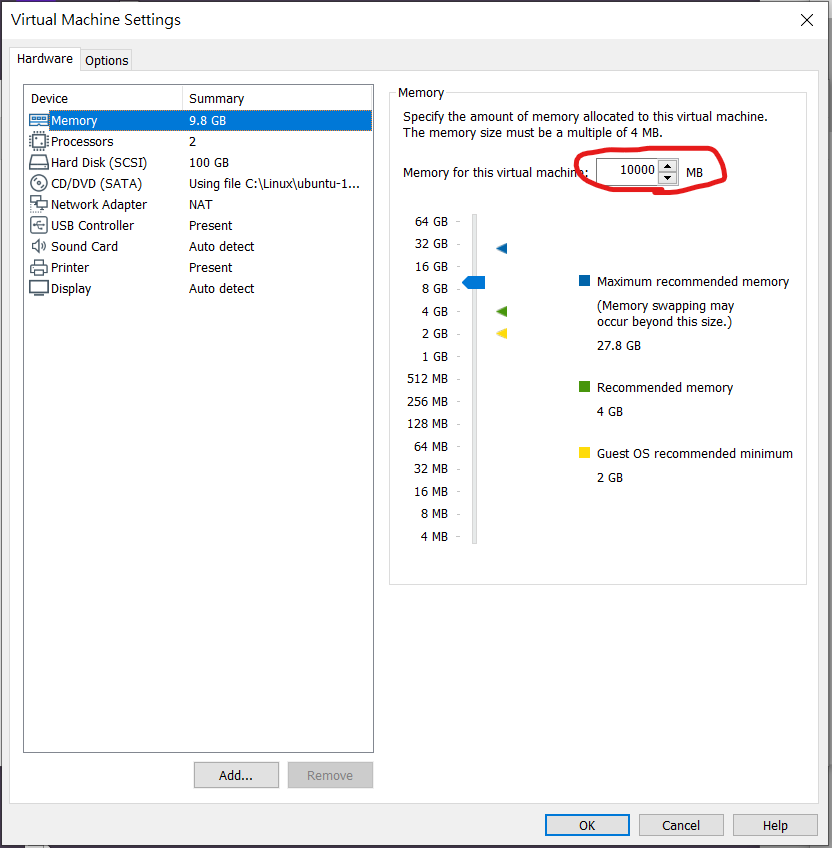
接下來都下載好之後,就是就是安裝的部分了,說明如下,請搭配圖片服用:
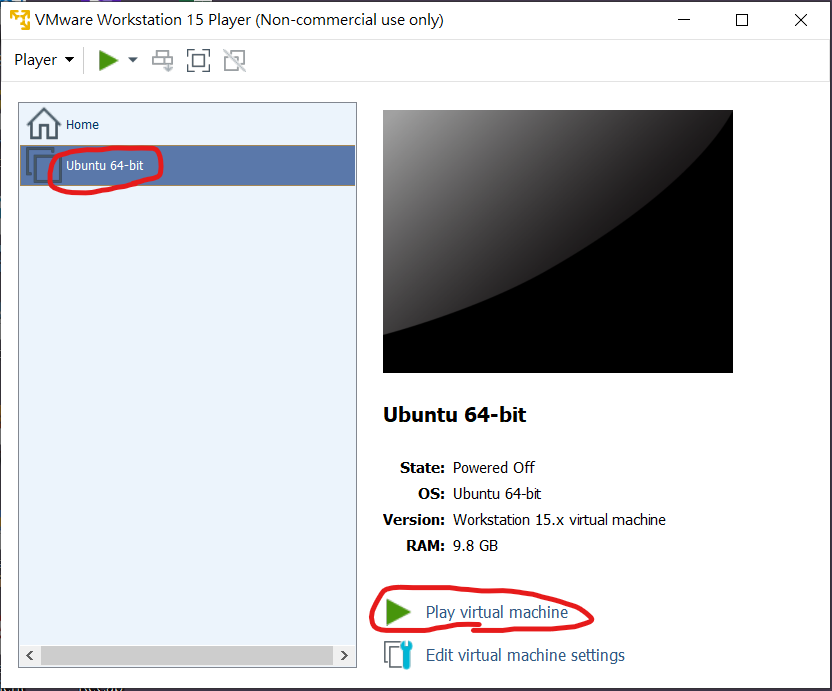
最後進入Ubuntu後,系統會要求一連串設置,不過由於內容是中文,步驟也都很簡單,在這裡就不再贅述。ROS基本環境的設置並不複雜,但由於整體篇幅較長,因此今天僅介紹安裝Linux Ubuntu的流程,明天筆者即將介紹在Ubuntu內部安裝ROS相關功能。

