大家好,又見面了。昨天介紹了虛擬機和 Ubuntu 的安裝,只差最後一步就能開始玩 ROS 啦!是不是很期待呢?所以今天要介紹的是 ROS 的安裝與執行。
ROS 其實分成了好幾個版本,而且更新速率都很快,不過每個版本差異其實都不大,因此不會因為經過了幾次迭代就變成最熟悉的陌生人。下面是近期較新的幾個 ROS 版本:
這次我們要使用的是較新的版本 ROS Melodic,就是充滿音樂氣息的那隻烏龜。如果各位有仔細看,就會發現每個版本的 ROS 都有不同的主題,像之前的 ROS Lunar ,就出現了月球與穿著太空裝的烏龜,是不是很有趣呢?拉回正題,接下來要教大家的是安裝 ROS Melodic 的流程。
首先要把 Ubuntu 內軟體與更新中的 universe、restricted、multiverse打開來:
他們各自的功能如下:
開啟一個終端機(Ctrl+Alt+T)並輸入以下指令:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
這一步是為了讓你的電腦能夠允許安裝來自 packages.ros.org 的軟體。 sudo 是表示執行這個指令需要系統管理員的權限才能執行。
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
如果打了上述的指令碼出現錯誤,可以把中間的一段 hkp://keyserver.ubuntu.com:80 替換成 hkp://pgp.mit.edu:80 試試。
接著就要正式的來安裝 ROS 系統了,首先先輸入以下指令確保我們的軟體是最新版本:
sudo apt update
接下來呢,將介紹四種安裝的方法,可以根據需求選擇一個最適合自己的。如果使用過後發現功能不足也不用擔心, ROS 允許自行額外擴充其他功能。
sudo apt install ros-melodic-desktop-full
內容包含了ROS、rqt、rviz、機器人資料庫、2D/3D 感知模擬系統。其中,rqt 與 rviz,後面的章節都會跟大家陸續介紹。
sudo apt install ros-melodic-desktop
相較於完整版,普通版少了 2D/3D 感知模擬系統。
sudo apt install ros-melodic-ros-base
如同字面上說的,僅具備了 ROS 的基礎架構,不包含任何額外的功能,可以想像成是一個剛組好,還未灌入任何應用程式的筆電。
sudo apt install ros-melodic-PACKAGE
若安裝完後發現自己還缺少某些功能或者軟體,接下來如果想要加裝其他功能也很簡單,只要把程式碼中的 PACKAGE 換成你想要加裝的 Package 名稱就可以了, Package 在日後會介紹到。
透過以下指令,我們也可以查看目前系統總共安裝了那些 Package :
apt search ros-melodic
為了方便每次開啟終端機時,將 ROS 的環境變量自動設置到 .bash 裡面,方便我們快速使用,因此我們還要輸入以下指令:
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
記住,上面指令碼 /ros/ 後的部分,必須是當前你所要安裝 ROS 版本名稱。
打開終端機後,輸入以下指令呼叫 ROS 的主機 master 做測試:
roscore
若是出現以下畫面就代表安裝成功啦(灑花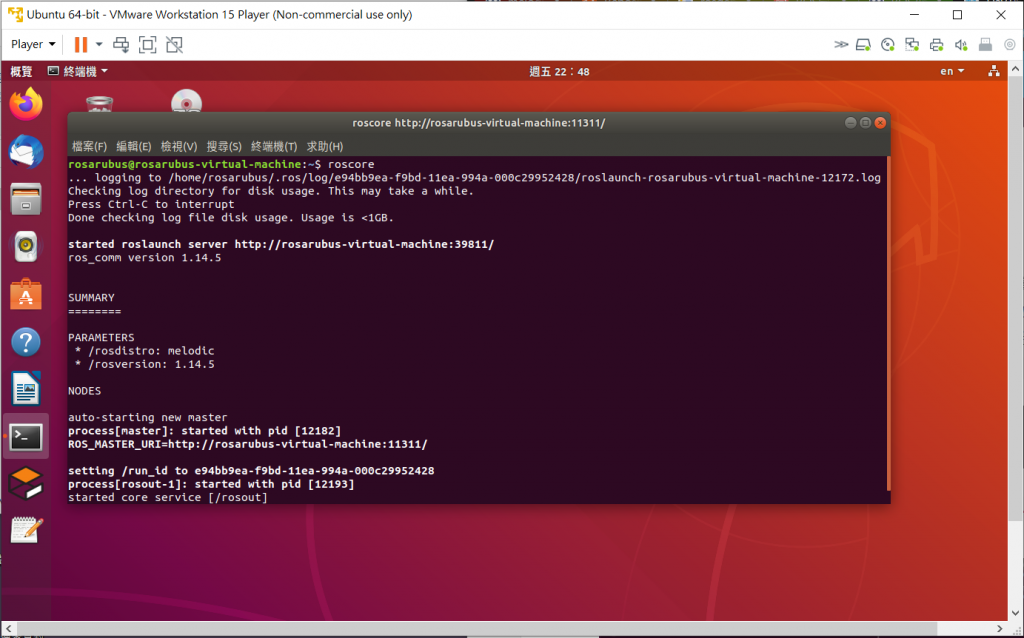
安裝這個 ROS 都是透過終端機來操作,還要輸入一堆看不懂的程式碼,是不是很新鮮呢?對平常都使用Windows或Mac OS的初學者而言,這些步驟及指令都不熟悉都是正常的,因為許多都是Linux的語法,若是平常沒有接觸,常常會一頭霧水。不過也不需要太擔心,因為明天要教的就是一些基礎的Linux的語法,而接下來的27天也會大量使用它,請大家敬請期待!!

