終於進入小車實作啦~~~~上個連假筆者本來就要來寫的,結果拖到這個連假才有空來玩車車XD
首先介紹筆者使用的車車,是跟我同事借的車車,規格如下:
刷機
基本上筆者在刷機的時候都是按照此篇教學完成的,樹莓派安裝ubuntu真的很不友善QQ 然後3B+又有已知問題要改映象檔,幸好教學內有神人幫忙完成了>____<
灌driver
基本上這次的車子只有光達需要灌driver,因為是ROS常用的lidar,所以也有官方寫好的package可以用了,只需要先去github下載package:
$ git clone https://github.com/Slamtec/rplidar_ros.git
把下載完的package丟到workspace內編譯:
$ mv rplidar_ros/ ${workspace_name}/src
$ cd ${workspace_name}
$ catkin_make
編譯完以後就可以執行寫好的腳本了,不過需要先修改lidar的權限讓程式可以存取:
$ sudo chmod 666 /dev/ttyUSB0
噢這邊還有一個地方要注意,如果你的lidar位置不是在ttyUSB0的話,需要修改package內的rplidar.launch,把路徑改成lidar所在的路徑:
$ cd ${workspace}/src/rplidar_ros/launch
$ vim rplidar.launch
腳本如下:
1 <launch>
2 <node name="rplidarNode" pkg="rplidar_ros" type="rplidarNode" output="screen">
3 <param name="serial_port" type="string" value="/dev/ttyUSB1"/>
4 <param name="serial_baudrate" type="int" value="115200"/><!--A1/A2 -->
5 <!--param name="serial_baudrate" type="int" value="256000"--><!--A3 -->
6 <param name="frame_id" type="string" value="laser"/>
7 <param name="inverted" type="bool" value="false"/>
8 <param name="angle_compensate" type="bool" value="true"/>
9 </node>
10 </launch>
把第3行的ttyUSB路徑改成lidar路徑,筆者的是在ttyUSB1。
修改完權限和腳本以後,就可以執行啦:
$ roslaunch rplidar_ros view_rplidar.launch
就可以看到rviz出現了,還有會顯示你的lidar掃出來的圖: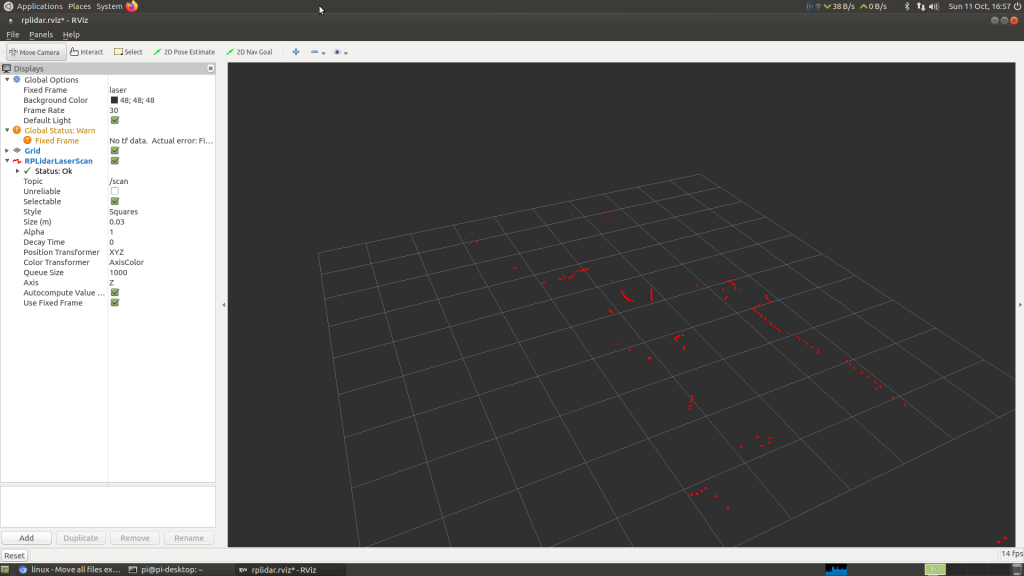
前置作業就完成啦~~
https://world.taobao.com/item/580809614752.htm

