昨天把lidar配置完成,並且準備好做SLAM的工具,但還有一個最重要的功能就是,讓車子動起來~~
所以今天來寫如何控車吧!
同事給的img裏面有眾多的程式,其實我們此次會用的部份有兩個
1.rikirobot/bringup.launch
2.teleop_twist_keyboard/teleop_twist_keyboard.py
首先我們要先能有與機器溝通的遠端介面,通常方便的文字使用者介面為SSH
ssh <username>@<ip address>
我們購得的履帶小車
username:clbrobot
password:123456
連入以後我們開啟一個腳本
roslaunch clbrobot bringup.launch
主要是開啟其中的serial driver,用來聆聽/cmd_vel命令並透過serial port控制馬達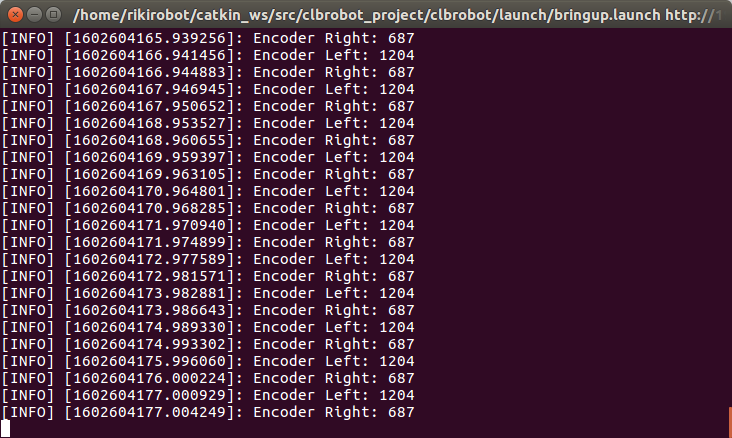
一個執行檔
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
用來監聽鍵盤事件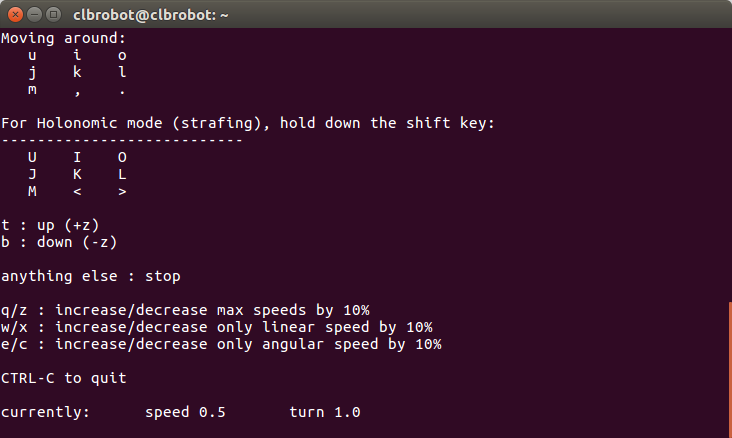
用圖來描述整個做動的流程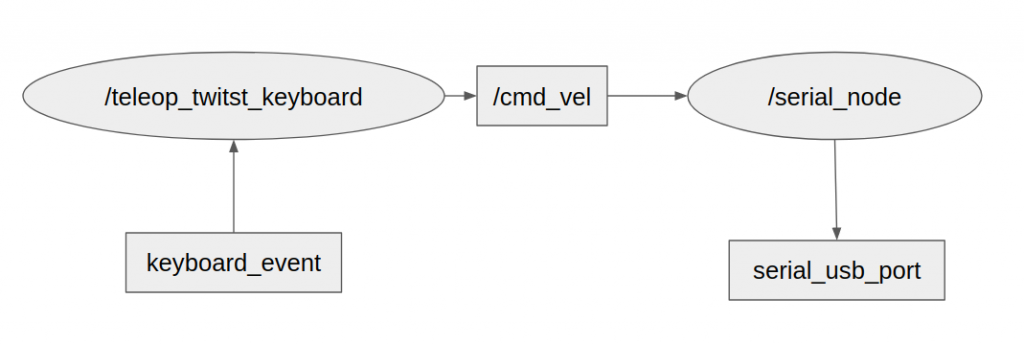

https://www.twblogs.net/a/5b99e0ae2b71773ebacd9be7

