延續昨天的進度,lidar裝完以後就可以為SLAM做準備了。ROS用來做SLAM的package其實超級多,筆者使用的是hector_slam。
這個package包含3個項目:
$ git clone https://github.com/tu-darmstadt-ros-pkg/hector_slam.git
回到workspace下catkin_make,就可以把別人寫好的東西拿來用囉!
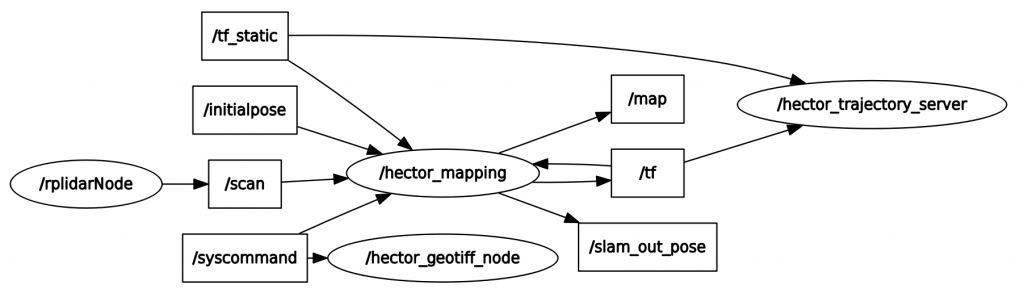
但是在使用之前,需要做一些topic和tf的轉換,可以先看到hector_slam的node graph:
https://yoraish.com/2020/01/23/a-full-autonomous-stack-a-tutorial-ros-raspberry-pi-arduino-slam/
https://github.com/tu-darmstadt-ros-pkg/hector_slam
http://wiki.ros.org/hector_slam

