上一章我們了解了分散式系統是什麼、為什麼要讓系統分散,
也大概知道分散式系統會遇到節點死掉、網路斷掉的問題。
接著將更加深入探討,
2.1、2.2 分別介紹兩個思考實驗,
2.3 建立系統模型,也就是把各種情況分類,
以便未來在這些假設基礎上去設計演算法。
2.4 則談談 容錯(fault tolerance)與高可用(high availability)的衡量標準。
2.1 The two generals problem
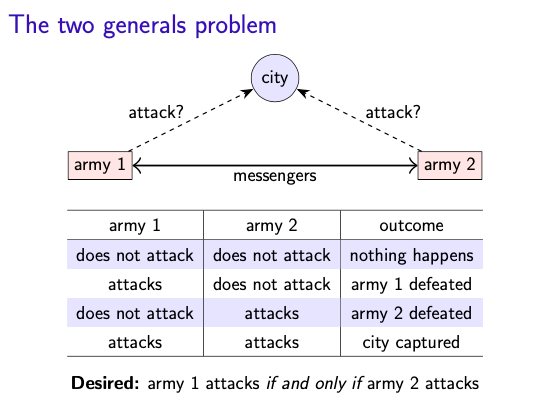
arm1 與 army2 需要同時出動,才能把城市攻打下來。
他們可以透過信使互相確認要出發的日期,但信使可能會被抓走。
- a model of network
- 目標:同時出發攻打城市
- 困難:信使會被抓
No common knowdlege
兩位將軍永遠不能確定另一位會在同一天出動!
試想:
- 將軍1 告訴 將軍2 出發日期,還沒收到將軍2 回信
此時將軍1 不知道將軍2 是沒收到訊息,還是返回的信使被抓了,因此不能輕舉妄動。
- 當將軍1 收到將軍2 回信,這樣將軍1 照時出發是一定安全的。
因為將軍2 言出必行!
- 將軍2 的狀況落回 step 1
將軍2 並不知道將軍 1 是否收到這個回信的回信?如果沒收到,將軍1 為了不全軍覆沒,可能會不出兵。
這樣就會形成一個無限的 sequence,每次都把全軍覆沒的風險拋給另一個將軍,永遠不能確定另一組軍隊會在同一天出動;就像 distributed system 中的 nodes 沒辦法確定其他 node 的狀態。
順帶一提,這就是 [[TCP 3-way handshakes]] 的情形,基本上只要雙方都收到了一次回信,那只要相信對方會出兵,就沒問題了。
2.2 The Byzantine generals problem
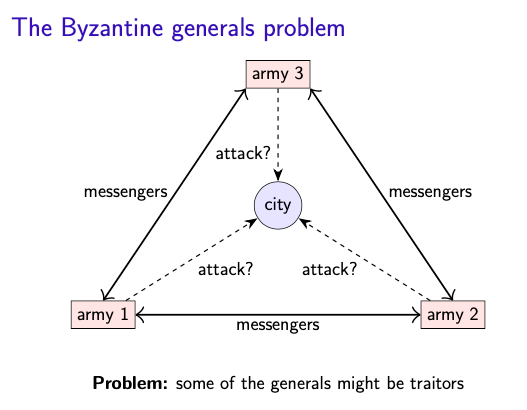
同樣是要同時出動、以信使確認出發日期,
這次假設信使一定會送達,但將軍之中有叛徒!
- a model of node behavior
- 目標:同時出發攻打城市
- 困難:現在保證信使必達,但將軍中有叛徒
可能 scenario
- 將軍3 發現將軍 1 和 2 說得不一樣,但不知道誰說謊,到底要進攻還是撤退?
Theorem 和其他解法?
- Theorem: 3f + 1 個將軍可忍受 f 個將軍是 malicious
- digital cert 可讓 general 2 向 g3 證明當初收到的訊息(g1 簽名)來證明 g2 沒說謊。
2.3 System model
雖然 2.1 和 2.2 把網路和節點錯誤分開討論,但現實中很常兩者同時出錯!
如果要設計演算法,就要對整個系統有一些假設,這裏從 3 個面向來探討:network, node behavior, timing。
1. network behavior
- reliable (perfect) link
訊息送出一定到達,順序不計較。
- fair loss link
訊息可能會遺失、重複、順序亂掉。
- arbitrary link
封包在網路上,每個經過的 node 都可以用 arbitrary 種方式處理(竄改、丟掉、或好好送)
link 可以透過網路協定而「升級」
- arbitrary -> fair loss: TLS
- fair loss -> reliable: retry + dedup
這樣好像只要能夠一直 retry,訊息總會送達。
但現實中,節點可能會 crash,然後某個訊息就永遠的消失。
2. node behavior
- crash-stop
硬體錯誤之類
- crash-recovery
- byzantine
a node is faulty if deviates from the algorithm.
可能是 crash 了,也可能被駭做出其他惡意行為。
在 byzantine 下,如果所有的 node 都跑同樣的程式,而這些程式有同樣的 bug,那這個系統是無法 tolerate 的(根據理論,叛徒要少於 1/3)。
node behavior 不像 network 可以透過 protocol 的保證來做模型之間的轉換。
3. timing
- synchronous
- partially synchronous
- asynchronous
用 synchronous model 設計演算法會簡單,但如果有一點點的差錯(超過預設的 bounded latency / execution speed),就會出非常大的問題。
用 asynchronous model 設計的演算法會十分 robust,但有些問題在此模型下無法被解決。
paritially synchronous 是個 compromise。大部分狀況都是 synchronous,只有當一些 timing guarantines are off 時,則切換成 async。
無法達成 synchrony 的原因
Networks
通常 latency 是可被預測的,但有時會增加:
- message loss
- 網路很擠,在排隊
- network/route reconfiguration
Nodes
通常 node execution speed 是可被預測的,但也有暫停的時候:
- OS scheduling
- stop-the-world garbage collection
- page faults, swap, thrashing
node execution speed 是可被預測的?
因為 instruction 要幾個 cpu clock cycle 都是可以知道的,clock speed 也不會差太多 `[note p19]`
所以實際上,使用 synchronous model 來設計演算法,很不可行。
System models summary
If your assumptions are wrong, all bets are off!
2.4 Fault tolerance and high availability
Fault tolerance
- Failure:整個系統爛掉
- Fault:一部份出錯(節點或網路)
因此會希望系統能夠容錯(fault tolerance),也就是在有部分爛掉的狀況,還能維持基本系統運作。
- Single point of failure(SPOF):一個 fault 造成整個系統 fail。這是要盡量避免的狀況。
High availability
- 討論可用性時,不會說這個系統可不可用,而是要依據「可用的比率」來判定。
- availability == uptime == fraction of time that a service is functioning correctly
“Two nines” = 99% up = down 3.7 days/year
“Three nines” = 99.9% up = down 8.8 hours/year
“Four nines” = 99.99% up = down 53 minutes/year
“Five nines” = 99.999% up = down 5.3 minutes/year
- Service level objective (SLO)
例如 "99.9% of requests in a day get a response in 200 ms"
- Service level agreement (SLA)
標明 SLO 的合約,公司若沒達成可能要賠錢。

