在先前[Day 09] tinyML開胃菜Arduino IDE上桌(下)已經簡單介紹過Arduino Nano 33 BLE Sense(以下簡稱BLE Sense)這塊開發板及如何連線及完成「Hello World, 閃爍吧 LED!」的範例程式,接下來就幫大家介紹如何用這塊開發板讓MCU聽到聲音並錄下聲音,而至於如何辨識部份就留待下回分解。
我們都知道人工智慧一個很重要的領域就是聲音,小到語音命令、異常聲音辨識,大到語音轉文字、自然語言處理、自然語言理解及文字轉語音,不過後者動輒數億到數百兆個參數,就算是一般電腦恐怕也不一定能滿足,所以tinyML的重點通常只用放在喚醒詞及聲音片段(含異常聲音)的辨識,常見的應用包括有智能音箱喚醒、電氣設備語音開關、馬達異常音偵測、生理監看(如心音、咳嗽音、呼吸聲)等。
其中喚醒詞(Wake-Up-Word)亦有許多同義詞,如:
要讓電腦聽懂聲音,首先要讓電腦聽到聲音,大家自然會想到加個麥克風(Microphone)不就得了。其實這中間沒這麼簡單,透過Fig. 11-1所示,大概就能知道基本流程,包括收音(電容式或微機電式麥克風)、信號放大、類比數位轉換(取樣、量化)及傳輸(儲存)等工作。
所謂聲音是物體高速振動經由空氣傳播到耳朵所產生的,但人耳通常只能聽到20 ~ 20K Hz(每秒振動次數),年紀大的人可能超過15K Hz就聽不太到了。聲音包含頻率(低沈或尖銳)和振幅(音量大小),所以首先要將這些微小的振動忠實的收集起來,再轉換成電壓並放大,而這就是傳統麥克風在作的工作。
接著將放大後的電壓數位化(Analog Digital Convert, ADC 類比數位轉換),而轉換時又要考慮量化解析度(位元數)及取樣頻率。前者代表對音量的解析能力,比方8 bit就表示最大音量變化(從最小到最大,可以有正負或非對稱)可分解成2的8次方,即256階,而16 bit就能分解成65,536階。後者則是對聲音變化的取樣速度,通常取樣要超過待測頻率的3到5倍,以免產生偽信號,所以像CD音質的取樣頻率就定為44.1K Hz,而DVD更高達96K Hz。
因此取樣頻率及分解能力越高越能接近原始聲音訊號,但帶來的問題就是需要更大量的儲存空間,以44.1 KHz, 16 bit (2 Byte)為例,一秒鐘就要 44.1K x 2 Byte = 88.2 KByte。一般MCU的SRAM通常不大的情況下,就要重新考慮夠用就好,不用一昧追高,只要足夠後續分辨即可。
通常ADC後可直接傳到電腦或MCU上儲存,但有些微機電(MEMS)型麥克風模組,直接整合了麥克風、放大器、類比數位轉換,最後再經由I2S(SPI)等通訊格式將已數位化的聲音傳輸到MCU中,可省去佔用MCU的ADC輸入端點,同時確保不會因線路傳輸干擾而得到過多雜訊。
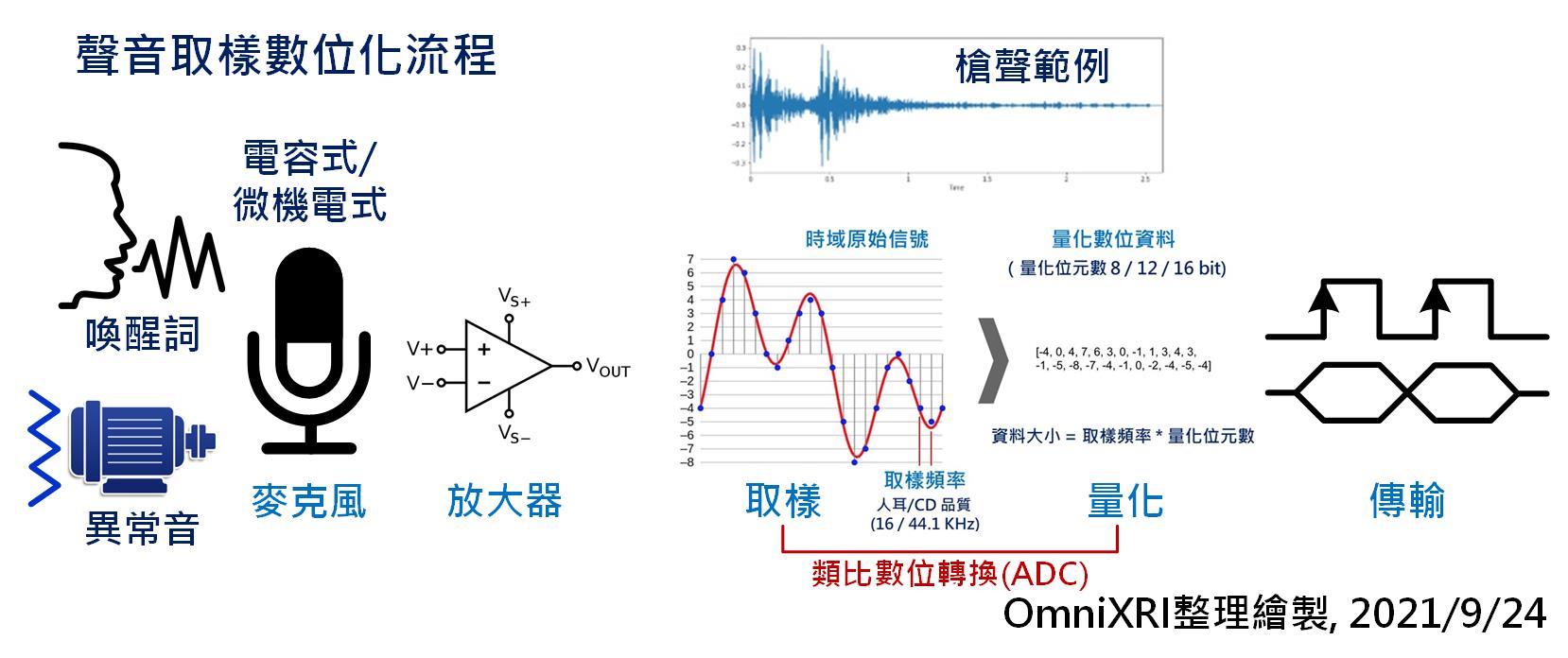
Fig. 11-1 聲音取樣數位化流程圖。(OmniXRI整理繪製, 2021/9/24)
如Fig. 11-2所示,目前BLE Sense開發板上就有提供MP34DT05-A這顆無向性微機電麥克風模組,且已使用I2S(SPI)方式連接到MCU上,其內部接線如圖所示,更完整的開發板電路圖可參考文末參考連結[BLE Sense電路圖]。其中LR(P0.17)信號線是方便系統上有接兩顆模組時切換左右聲道用的,但通常作為喚醒詞或異常聲音片段偵測時僅需單聲道即可。這裡和電源VDD和LR接在一起,是為了節省接腳和省電二個用途,當P0.17 低電位時,模組不耗電也不輸出。而輸出DOUT(P0.25)採脈波密度調變(Pulse Desity Modulation, PDM)方式輸出,若LR信號為高電位時,會在CLK(P0.26)高電位時將結果由DOUT送出,而低電位時DOUT則為不輸出(Hi-Z 高阻抗)。至於PDM更進一步說明,可參考文末參考連結[AN2057應用筆記]
MP34DT05-A其主要規格如下所示,更完整的規格書(Datasheet)可參考文末參考連結[MP34DT05-A 資料手冊]。
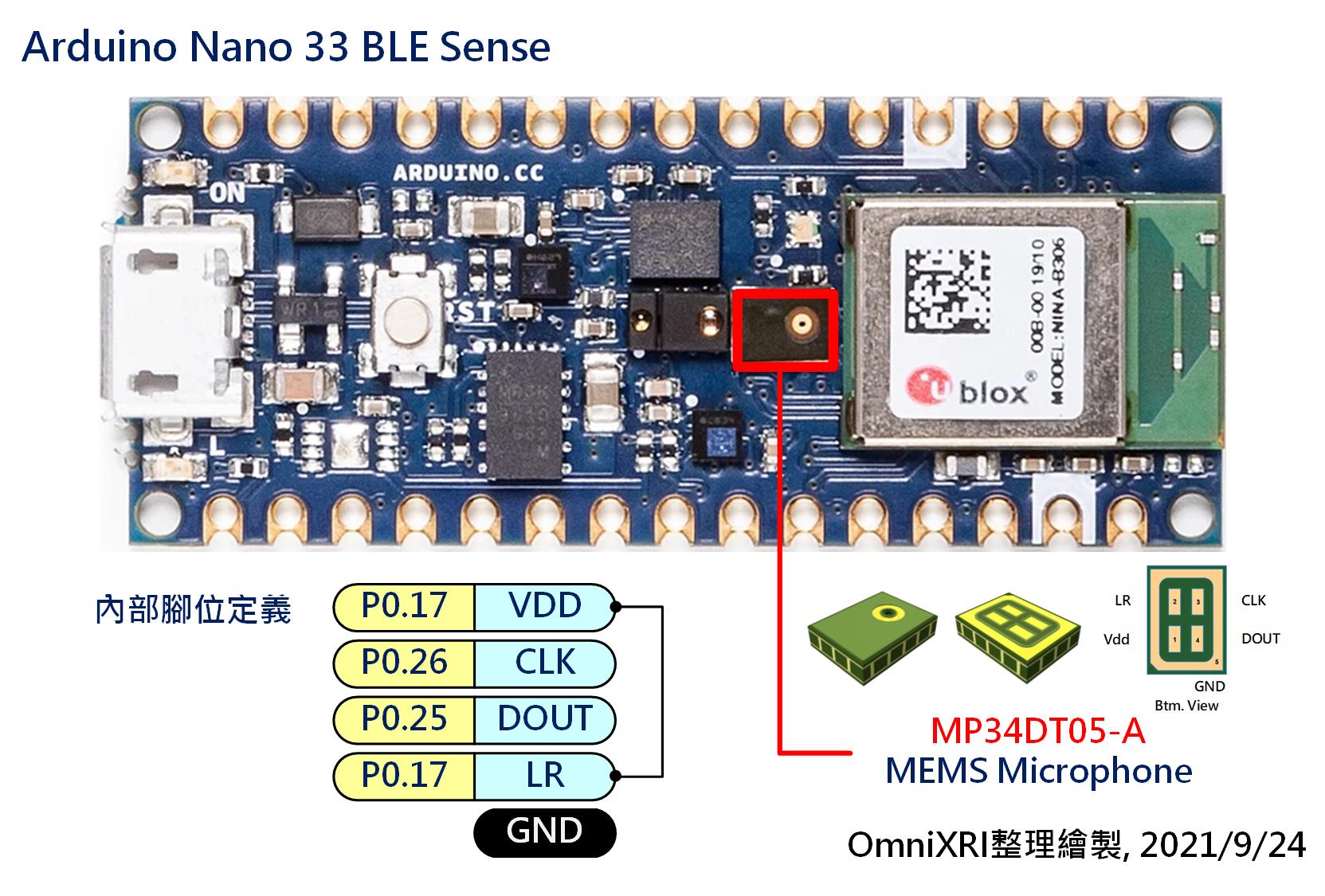
Fig. 11-2 Arduino Nano 33 BLE Sense 微機電式麥克風模組MP34DT05-A配置及接線定義。(OmniXRI整理繪製, 2021/9/24)
接著就以Arduino IDE來介紹如何從麥克風讀取聲音大小的數值到MCU並回傳讀到序列監視器。這裡Arduino已幫我們準備好現成的範例,只需點擊主選單的[檔案] ─ [範例] ─ [Arduino Nano 33 BLE的範例] ─ [PDM] ─ [PDMSerialPlotter],就會自動產生一範例程式,如下所示。其中主要包含三大區。
完整範程式可參考下列程式碼及註解。
/*
PDMSerialPlotter.ino
由Arduino IDE 主選單的檔案 ─ 範例 ─ Arduino Nano 33 BLE的範例 ─ PDM ─ PDMSerialPlotter 取得
主要功能為從MP34DT05-A微機電型麥克風模組透過I2S讀取聲音訊號,並透過IDE內建序列繪圖工具將波形繪出。
註:序列繪圖器尚未加入Arduino IDE 2.0 Beta中
本範例支援
- Arduino Nano 33 BLE board, or
- Arduino Nano RP2040 Connect, or
- Arduino Portenta H7 board plus Portenta Vision Shield
*/
#include <PDM.h> // 導入PDM函式庫
static const char channels = 1; // 設定為單音通道,通道數為1
static const int frequency = 16000; // 設定PCM輸出頻率為16KHz
short sampleBuffer[512]; // 取樣緩衝區,每筆資料為Short(16 bit)
volatile int samplesRead; // 已讀取樣本數量
// 設定腳位用途及模組初始化(只在電源啟動或重置時執行一次)
void setup() {
Serial.begin(9600); // 設定序列通訊速度為9600 bps
while (!Serial); // 若序列埠未能成功開啟則一直等待
PDM.onReceive(onPDMdata); // 指定PDM接收回調函數
// PDM.setGain(30); // 選擇性設定PDM增益值,BLE Sense預設值為20
if (!PDM.begin(channels, frequency)) { // 初始化PDM參數,單通道收音,16KHz取樣頻率。
Serial.println("Failed to start PDM!"); // 若PDM初始化失敗則顯示字串
while (1); // 永久等待
}
}
// 設定無窮循環程式 (會一直依序重覆執行)
void loop() {
// Wait for samples to be read
if (samplesRead) { // 若讀取樣本數不為零
// 根據樣本數列印樣本數值到序列監視器和繪圖器
for (int i = 0; i < samplesRead; i++) {
if(channels == 2) { // 若設為左右聲道,通道數為2
Serial.print("L:"); // 列印「左」提示字串到序列監視器
Serial.print(sampleBuffer[i]); // 列印取樣數值到到序列監視器
Serial.print(" R:"); // 列印「右」提示字串到序列監視器
i++; // 計數值加1
}
Serial.println(sampleBuffer[i]); // 列印取樣數值到到序列監視器
}
samplesRead = 0; // 清除已讀樣本計數器
}
}
/*
PDM接收回調函數,負責處理從麥克風送回的PDM格式資料
這個函式是透過中斷服務函式(ISR)完成的,但不支援Serial列印訊息功能。
*/
void onPDMdata() {
int bytesAvailable = PDM.available(); // 查詢可用的資料大小
PDM.read(sampleBuffer, bytesAvailable); // 讀取可用的資料到緩衝區
samplesRead = bytesAvailable / 2; // 由於讀入的資料為16bit格式,所以已讀樣本數量要除2
}
最後讀取到的聲音數值變化如Fig. 11-3所示。目前這個程式是連續一直讀,沒有停止,有興趣的朋友可自行加點料,改成看到某個輸入(觸發)信號,再收音1秒或擷取一段指定長度的資料,這樣就會更接近tinyML雲端一站式開發平台在做的事。
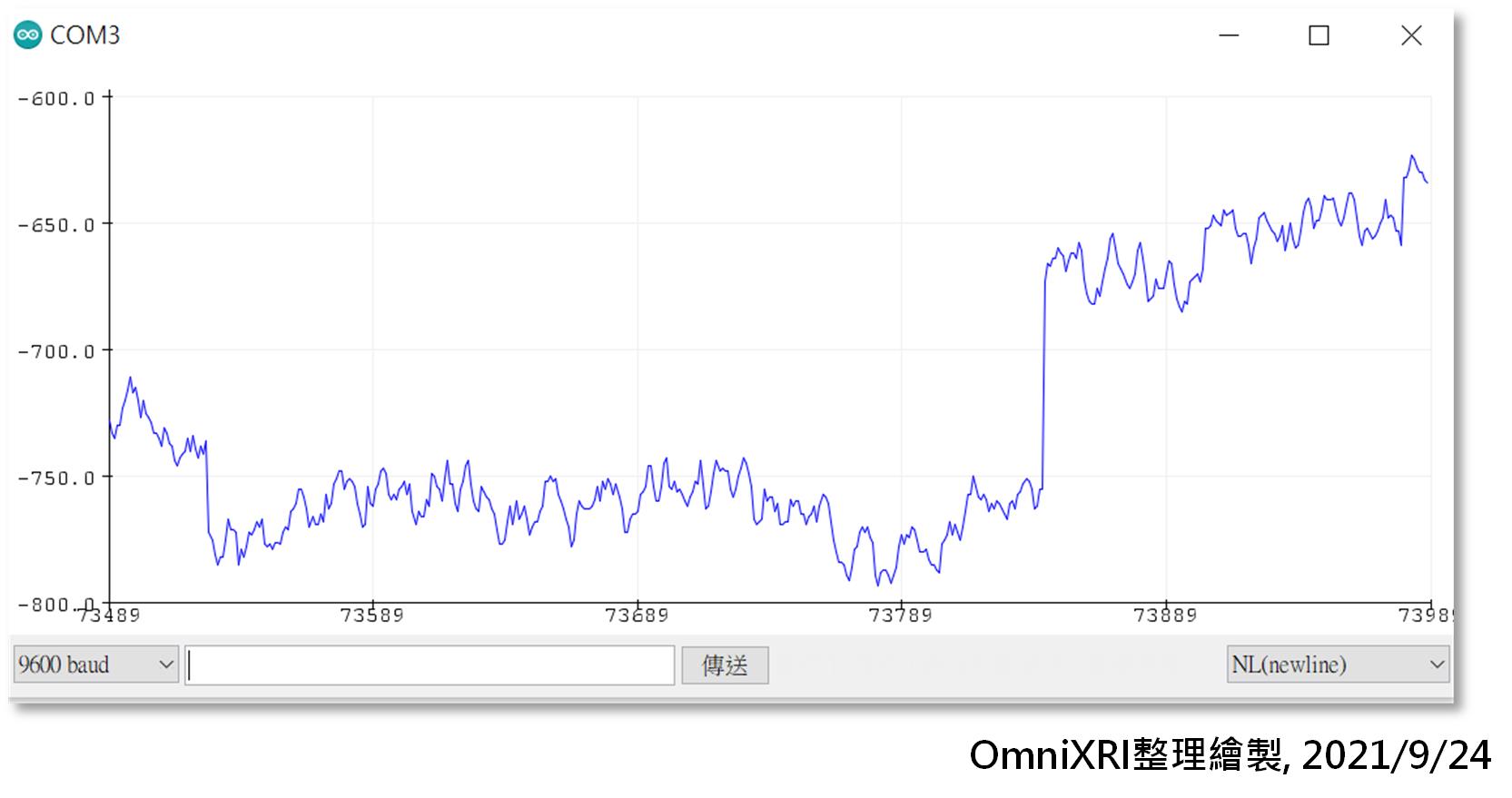
Fig. 11-3 Arduino IDE 序列繪圖器即時顯示麥克風聲音變化圖。(OmniXRI整理繪製,2021/9/24)
參考連結
Arduino Nano 33 BLE Sense Schematics電路圖
AN5027 应用笔记 ─ 使用STM32 32位Arm® Cortex® MCU连接PDM数字麦克风(簡體版)
MEMS audio sensor omnidirectional digital microphone MP34DT05-A Datasheet 資料手冊
samplesRead = bytesAvailable / 2; // 由於讀入的資料為16bit格式,所以已讀樣本數量要除2
還是不懂為什麽要除2?
由於讀到的原始數據數量byteAvailabe單位為Byte(8bit),而一筆資料是16bit(8bitx2),所以真正讀到的資料筆數samplesRead要除以2,才是真正的資料筆數。
明白了,謝謝


 iThome鐵人賽
iThome鐵人賽