今天是機派X系列文章的第十四天。
昨天將無人機的電源分配版、馬達與電子變速器組裝好了,今天再把剩下的東西做完吧!
本篇大綱:
延續電源分配版所在的基底,往下延伸一個平台,用於放置飛行控制器。
將飛行控制板固定於機板上,由於飛行控制板當中有感測器,因此須遵循板上的箭頭安裝,板上的箭頭方向代表無人機正前方。另外,要順便將等等會用到的所有連接線都先插好,因為等等安裝飛行控制板的平台後空間會很小,不利於插拔線材。POWER1 與 POWER1 插至電源分配版的 PWR1 與 PWR2 腳位 。TELEM1 等等會接到數傳模組上。TELEM2 等等會接到樹莓派上。DSM / SBUS RC 等等會接到遙控器的訊號接收器上。GPS MODULE 則是 GPS 模組的連接線。I/O PWM OUT 直接連接至電源分配版的 I/O-PWM-IN 即可。
接下來將飛行控制板的基底固定於電源分配板的基底下方,並將多餘的線材整理好,避免之後無人機飛行時勾到線材。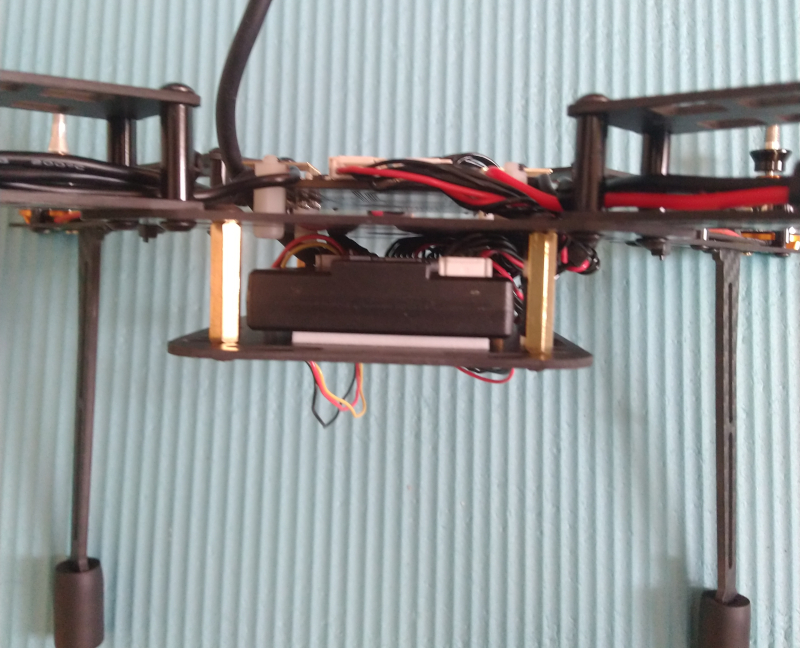
整理線材時要避開飛行控制板側邊的插孔,不然之後使用插孔時你會想哭。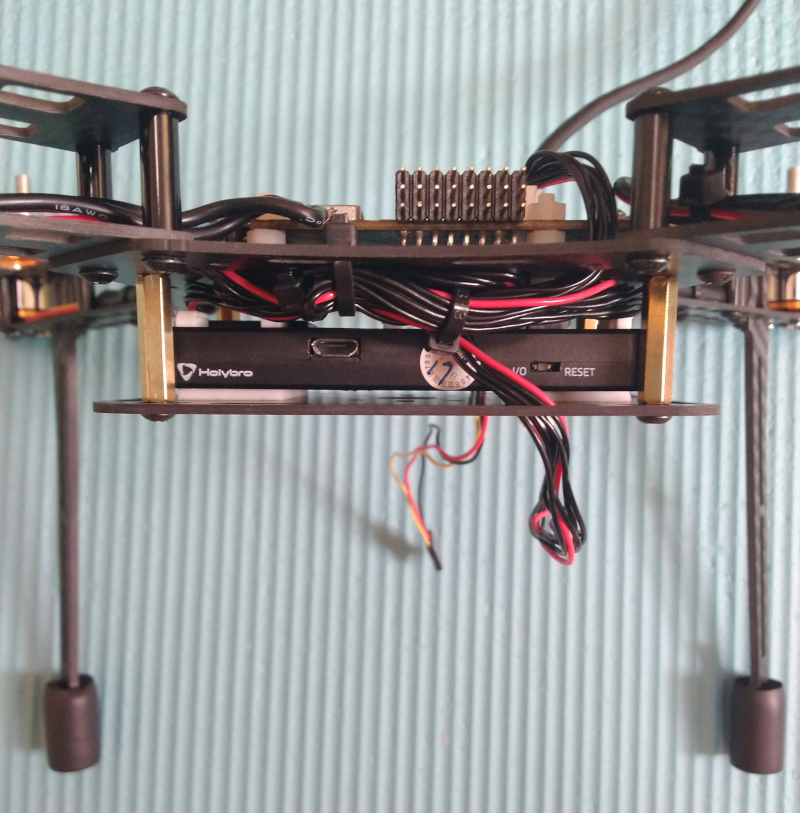
接下來安裝飛行控制板兩側的數傳與遙控器訊號接收模組。
我將遙控器訊號接收模組安裝於飛行控制器的底板下,並將剛剛從飛行控制器連接出來的訊號線接到遙控器訊號接收模組上。由於無人機一般是在天上飛,而人通常是在比無人機低的地方操作遙控器,因此我將遙控器訊號接收模組的天線朝下擺置以利訊號的收發。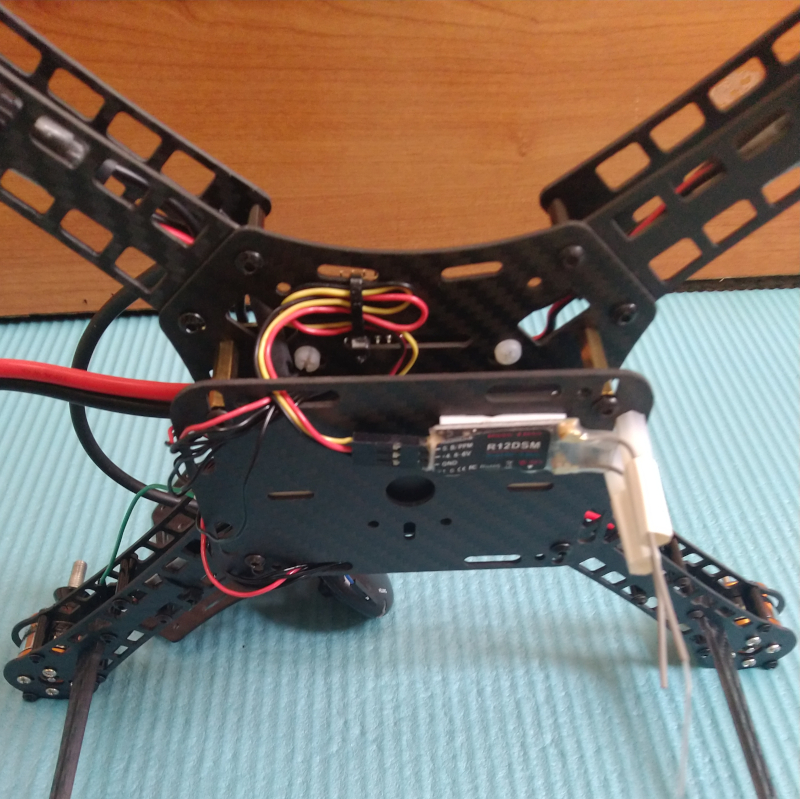
在遙控器訊號接收模組對面,我安裝了數傳模組。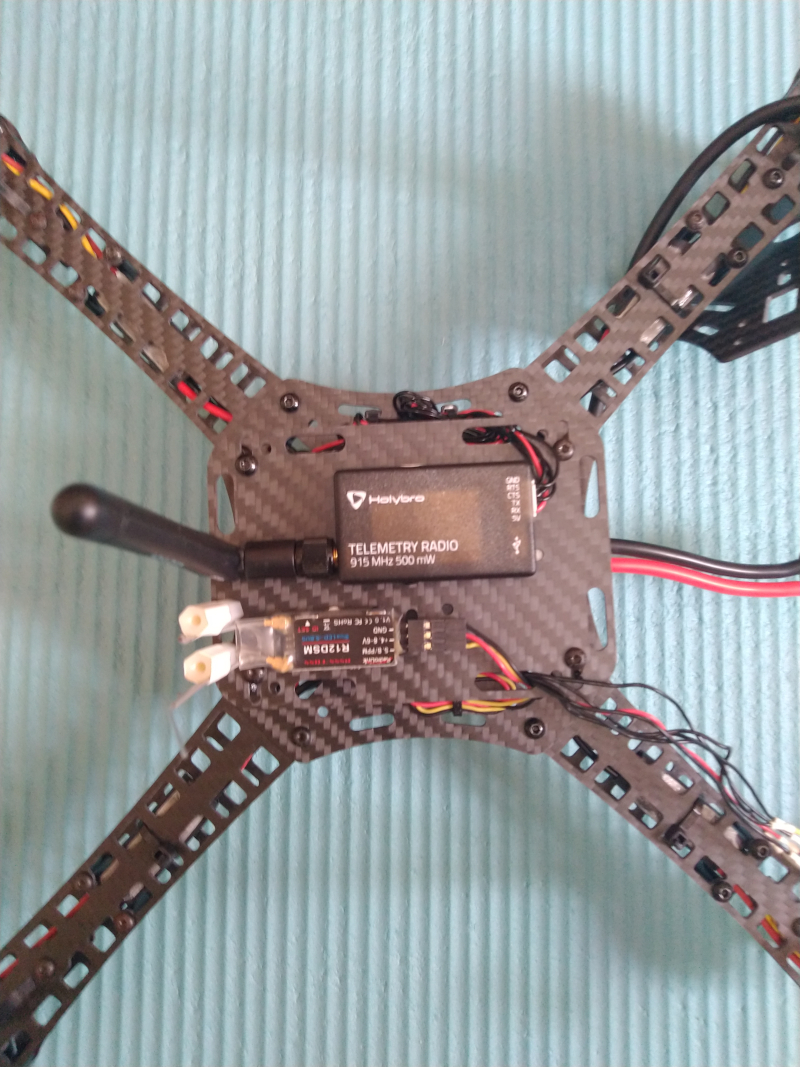
接下來安裝樹莓派。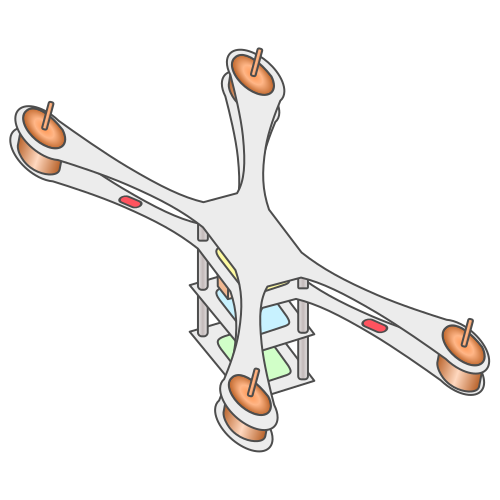
將樹莓派固定在底板上。
別忘了碳纖維底板是導體,因此要將樹莓派墊高,以免樹莓派上的焊點因碳纖維而發生短路。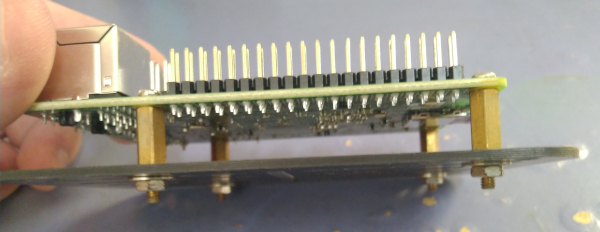
將樹莓派這層的底板安裝在飛行控制器的底板之下。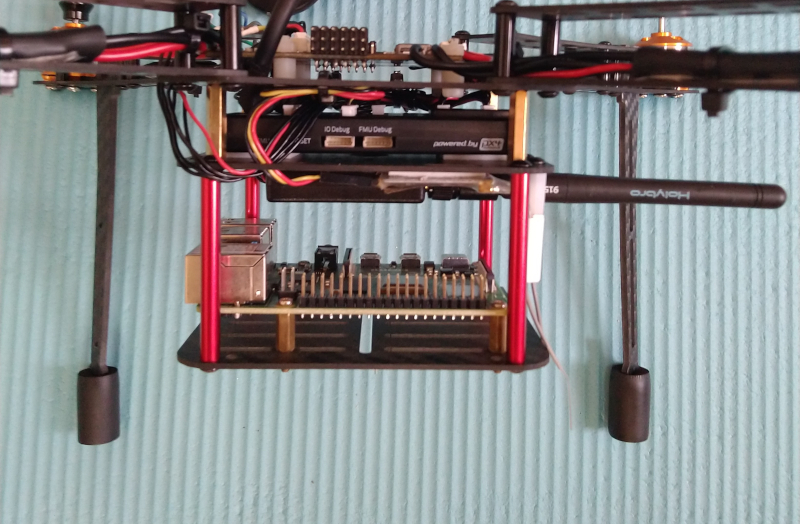
將剛剛從飛行控制器接出來的線插到樹莓派的 GPIO 腳位上。
具體如何接線以及為何這樣接,會在之後的文章中說明。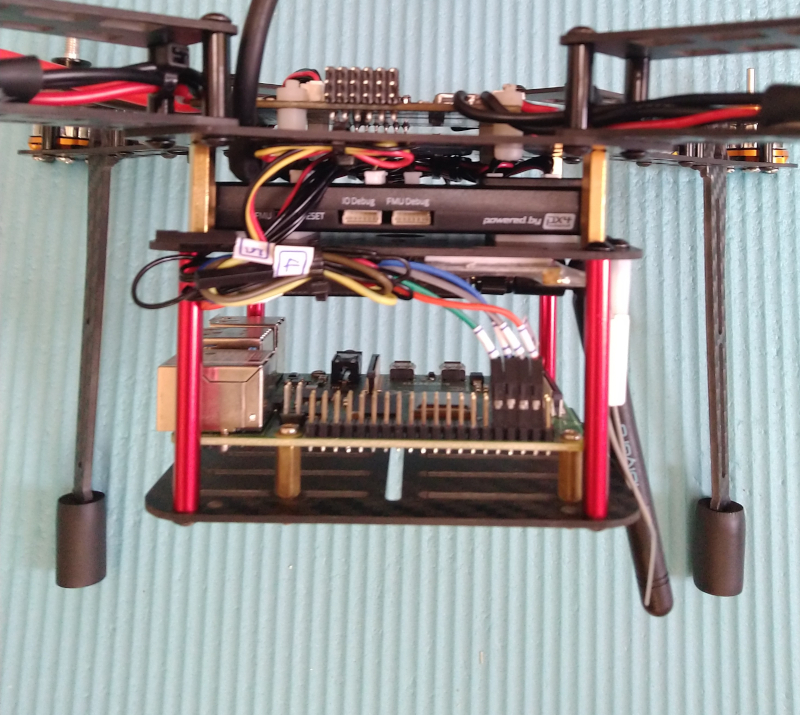
最後是安裝 GPS 模組。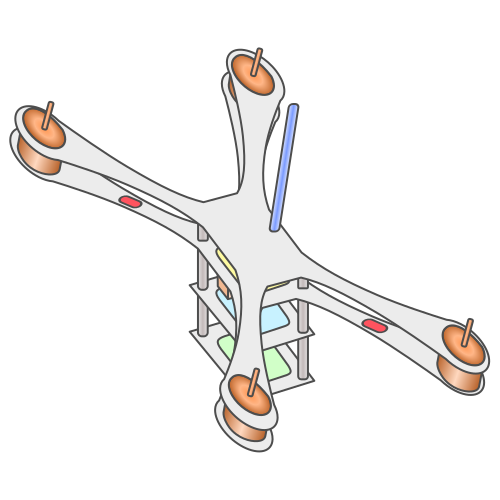
將 GPS 模組安裝在最頂端的旁邊,中間的部份要預留給電池。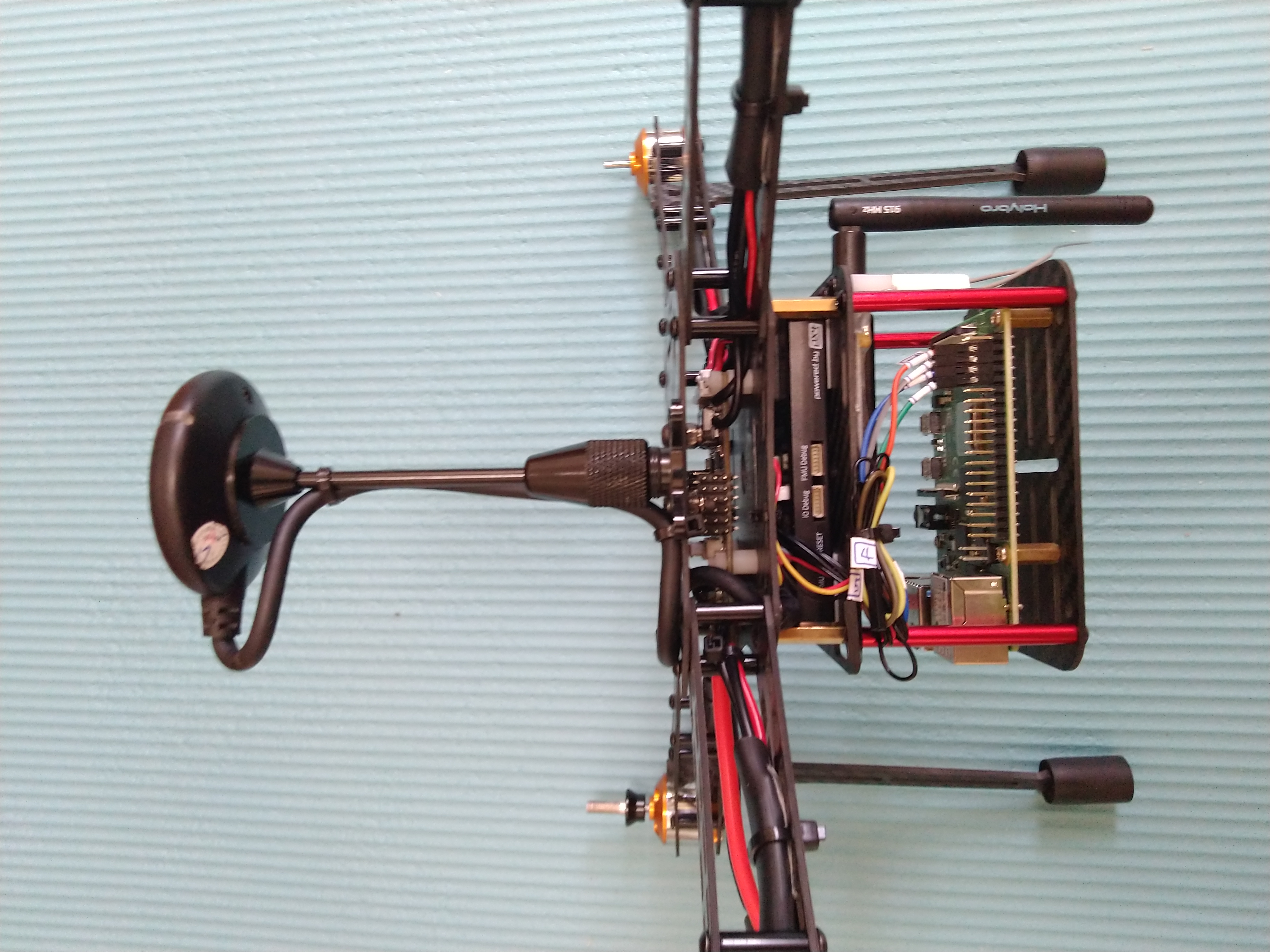
GPS 模組安裝時也需要注意方向,因為 GPS 模組中也有感測器。GPS 模組中的香菇頭頂端有個箭頭,該箭頭方向應與飛行控制器上的箭頭方向一致。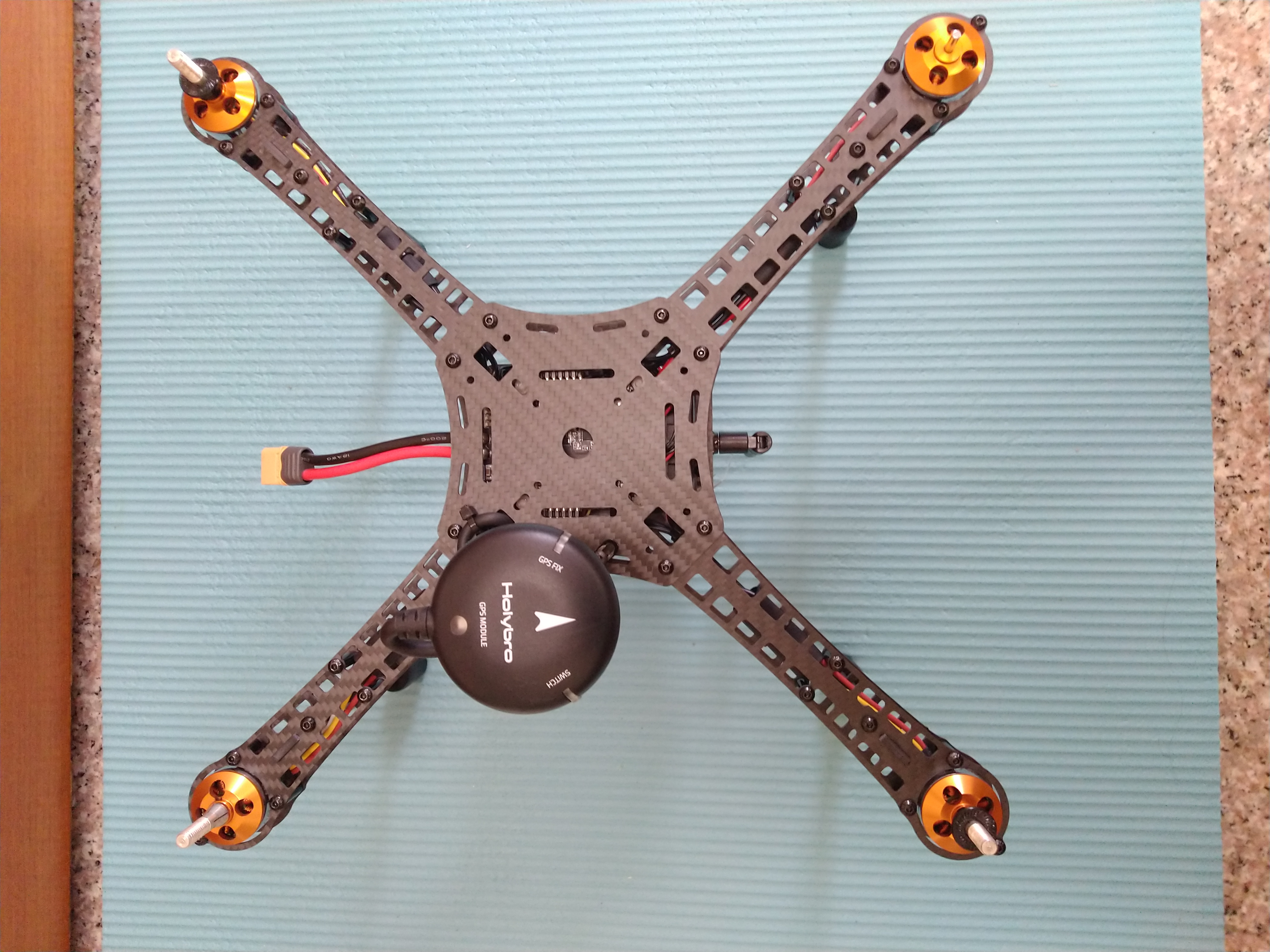
以下就是今日的無人機安裝進度,有機會的話,建議讀者實際操作看看。目前我們的無人機已經大致組裝完成!之後就可以執行設定及校正的工作。也許你會覺得奇怪,為什麼螺旋槳還沒安裝呢?因為之後執行初始化設定時,會需要先拆下螺旋槳以策安全,因此這邊我們就先不安裝螺旋槳。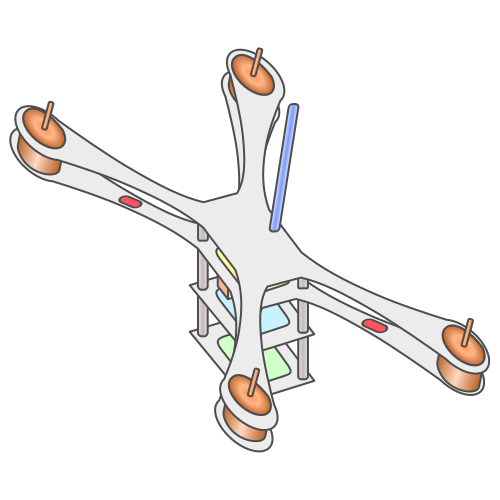
如果對於文章內容有建議、糾錯或圖源標示不正確的問題,歡迎參考 [機派X] Day 1 嘗試與文章作者聯絡。
想看更多本系列的文章,請連結至 [機派X] Day 1 查看大綱。

