今天是機派X系列文章的第十一天。
昨天很寒酸的簡介無人機,今天會從單一零件的角度一一將無人機的結構拆解說明。
本篇大綱:
昨天比較偷懶,內容超級少,今天認真一點,詳細介紹無人機上的各組件。無人機上能配備的組件很多,以下僅以必要或常見的部份來介紹,之後也會用這些組件組出一台可能能動的無人機。由於相關零組件眾多,因此會分成兩篇來介紹。
Note :
圖片中的組件看起來可能舊舊的,因為那是我們實驗室使用已久的無人機,之前墜機後就被拆解,這次我就直接拿他來當教材了!另外,有些零組件因為沒有標示型號,因此無法查詢硬體規格書,我只能猜測接腳(pin)的用途,可能沒辦法給出 100% 正確的答案。
一台無人機一定需要一顆好電池(Battery),電池為無人機上的各組件提供電源(Power)。由於無人機上組件中,最耗電的莫過於無刷馬達了,一顆無刷馬達在無人機飛行時可耗的電流高達幾十安培,因此選擇電池時,需要搭配無刷馬達的型號(不同型號的功率不同)選擇合適的電池。
這邊我們使用的是 ELL MAX 3S 5800mAh 25C 的鋰聚合物(LiPo)電池。
這邊簡單介紹一下鋰電池:
基本上每顆(cell)電池工作電壓都是 3.7V,電池充飽電壓是 4.2V,通常放電到 3.0V 就算過放。對於無人機飛行來說,如果單顆電池達到 3.4V 就建議不要飛行,而應該拿去充電了。另外,鋰電池、長時間不用(例如:一個月以上)應該要適當的放電至 3.6V,而不要維持在充飽的 4.2V 保存。若電池膨脹後,則應該丟棄,不要再使用!
我們的 ELL MAX 3S 5800mAh 25C 其實是將三個一顆(one cell)的鋰聚合物電池做串連(Series)而得,所以稱為 3S,因而工作電壓是 3.7V * 3 = 11.1V,其他部份也是以此類推。而電池的總容量是 58000mAh,電池容量越大,無人機的續航時間越長,通常會根據無刷馬達的功率以及需要的飛行時間來選擇電池容量,我們這顆電池下可以讓我這台無人機飛行半小時。最後談到電池規格中的 25C,25C 指的是電池單位時間最大可釋放自身容量的 25 倍電流,這個數值也是要依照無刷馬達的功率來選擇,因為如果電池單位時間能供給的最大電流無法滿足無刷馬達,則可能導致無人機無法飛起來,或是飛到一半墜機,我們選用的這顆電池是 5800mAh 25C 也就是說單位時間最大可釋放 5800 * 25mA 的電流(也就是 145A)。

電源分配版又稱電源管理版(Power Management Board , PMB)是用來將電池供給的電力分送至其他部件的控制板。
我使用的是 Holybro PM07-V2.2 型號的電源分配版。
以下是電源分配版的正面。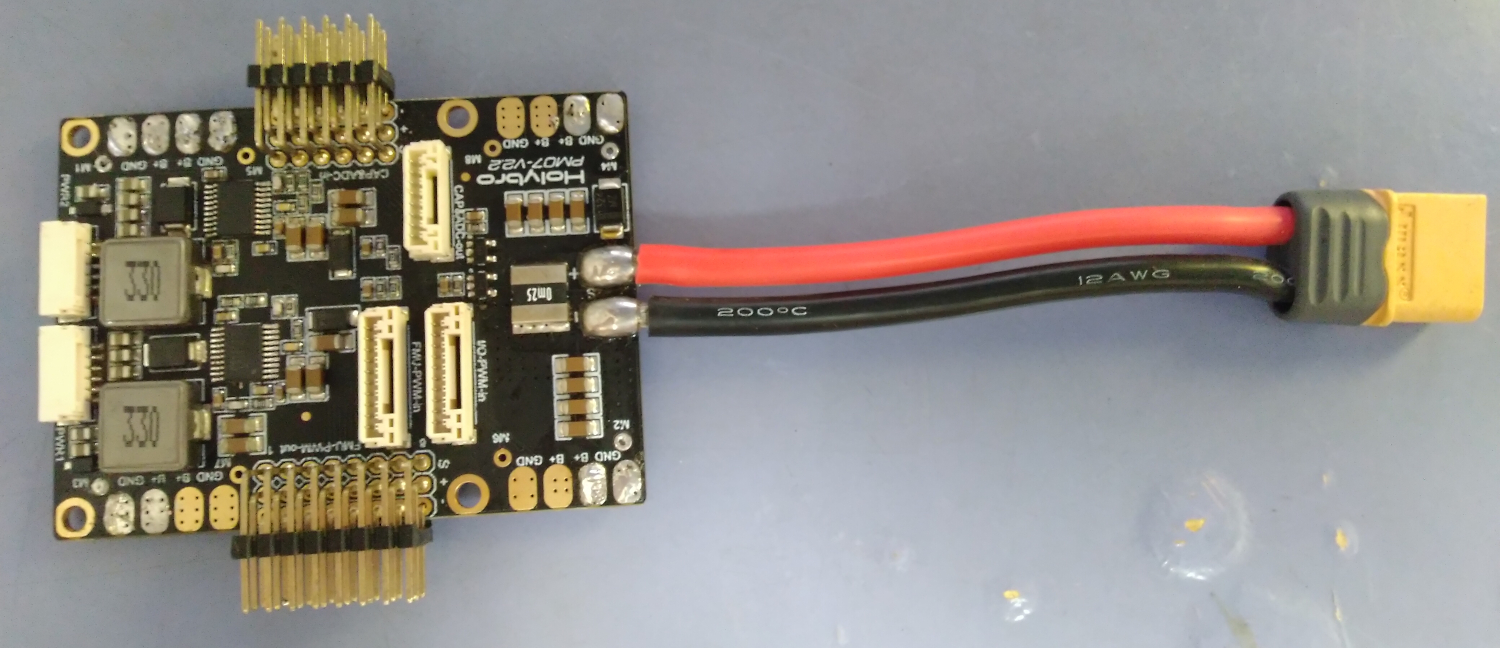
以下是電源分配版的背面。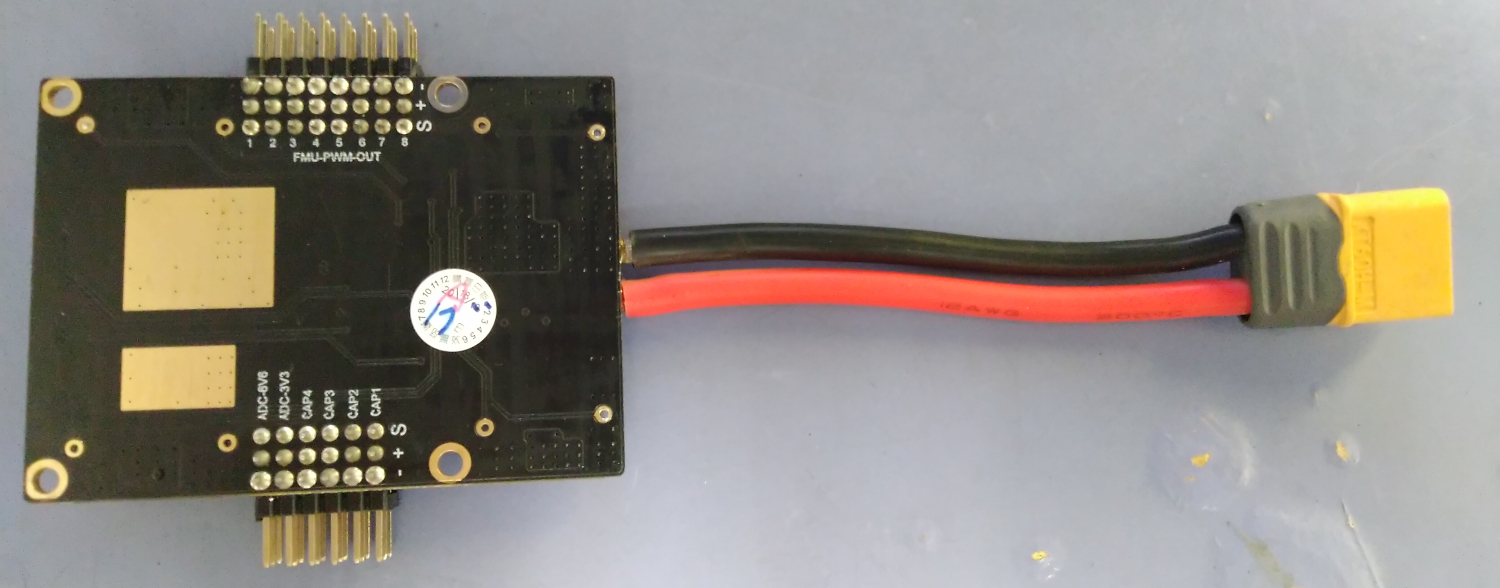
應該很明顯可以看出焊接上去的那條線是連接到電池的,那邊是整個電源分配版的電源輸入,接下來電源分配版會再將電源輸出至板子正面的對應接口,只需要將對應的元件按照板上標示的接口連接(或焊接)就可以了。
詳細各接口的用途以及規格,可以參考本板官方提供的 使用手冊 。
如果說 CPU 是一台電腦的核心運算擔當,那飛行控制器就是無人機的飛行決策擔當。飛行控制器(Flight Control)通常會搭配 GPS 模組(GPS module)一同使用。
飛行控制器上佈滿許多接口,無人機上的所有部件都會連接到飛行控制器上,感測器的資料能協助飛行控制器取得當前的環境與無人機所在的位置,飛行控制器會再發送相對應的控制訊號控制馬達的轉動,如此一來便能掌控整個無人機的飛行。此外,飛行控制器內有加速度儀、磁力計、氣壓計等精密感測器(Sensor),這些感測器也能為無人機的飛行提供許多有用的資訊。
以下是我使用的 PixHawk 4 標準版的圖片。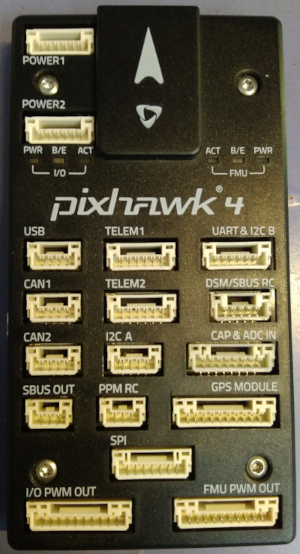
從左邊看。
從右邊看。
詳細資訊可以從 PixHawk 官網中查詢 相關文件 ,這些文件至關重要,之後組裝無人機時,會需要參考文件來連接與設定各部件。
而這張則是 GPS 。
還是 GPS 。
GPS 中間的支撐柱是碳纖維材質,用於將 GPS 模組架高以防受到週邊其他電子裝置的干擾(例如:無刷馬達),而影響 GPS 訊號的接收。
GPS 本體只有上面那顆香菇頭,香菇頭中還配備了陀螺儀等設備,GPS 模組會直接連接到飛行控制器上,直接將資料交給飛行控制器處理。
接下來則是無刷馬達(Brushless Motor),在前面已經提到多次,無刷馬達能夠控制無人機的飛行,例如:上升、下降,透過改變不同馬達的旋轉方向,還能讓無人機轉彎。
以下是本次使用的 SDMODEL A2212 - 1400KV 無刷馬達。
從底部看可以觀察到內部線圈以及外圍的磁鐵。
SDMODEL A2212 - 1400KV 是外轉子馬達,也就是說馬達轉動時,是外部那層在轉,如果有使用過玩具車的小馬達,通常都是內轉子馬達,轉動的都是內軸。而挑選一個好馬達首先要了解並非轉速越快的馬達越好,因為通常馬達分兩種:高轉速但是低扭力、低轉速但是高扭力。無人機需要的是高扭力,透過扭力帶動無人機飛行,而外轉子馬達通常都是具備高扭力低轉速的型號,詳細資訊可以參考 這篇文章 。如果你還是很疑惑,不明白轉速跟扭力的不同,我可以舉個簡單的例子:一個高轉速低扭力的馬達雖然轉的快,但是如果我的手握住馬達的轉子,則轉子就無法再輕易轉動,因為這顆馬達扭力小;反之,一個低轉速高扭力的馬達雖然轉的慢,但是如果我嘗試用手握住馬達的轉子,則轉子較不容易被我控制,而因此停止轉動,因為這顆馬達扭力大。從以上這段例子可以知道,當無人機的馬達開始旋轉時,你應該 遠 離 它 !尤其是當馬達裝上螺旋槳後,即便螺旋槳是塑膠的,還是能夠輕易將你刮傷。
聽起來覺得我很了解?當然,我的手被螺旋槳刮過,所以我知道,基本上很痛、會流血的那種,事後還有可能留下疤痕,不過倒不至於送醫那麼誇張。
我使用的 SDMODEL A2212 - 1400KV 具有 1400KV,KV 是指:每增加馬達 1V 電壓的電源供應,馬達每分鐘能再多轉幾圈。以 1400KV 來說,給予馬達 1V 的電壓轉速可以達到 1400rpm(Rotate per Minute , RPM),給予馬達 2V 的電壓轉速可以達到 2800rpm 。要選擇多少 KV 的馬達會影響到要消耗多少電流、無人機的總負重限制、螺旋槳的大小等,因此挑選時要謹慎。
如果對於文章內容有建議、糾錯或圖源標示不正確的問題,歡迎參考 [機派X] Day 1 嘗試與文章作者聯絡。
想看更多本系列的文章,請連結至 [機派X] Day 1 查看大綱。


 iThome鐵人賽
iThome鐵人賽