今天是機派X系列文章的第十二天。
今天會接續昨天的部件介紹,將剩下幾個重要的部件介紹給大家。
本篇大綱:
昨天結尾的部份提到了無刷馬達,然而無刷馬達的故事還沒有結束。
從昨天提到的內容,我們可以將各部件的關係圖畫出如下。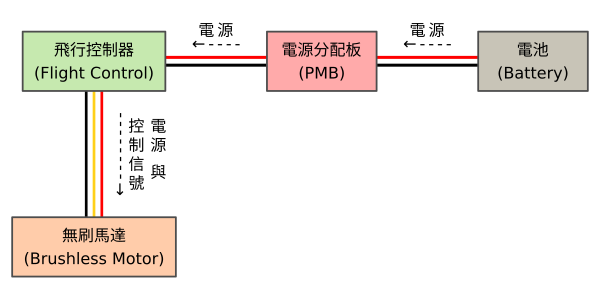
飛行控制器本身功耗不大,只是提供訊號的接收(例如:從其他感測器拿資料)與發送(例如:傳送控制信號給無刷馬達),因此飛行控制器本身能夠承受的電壓與電流都不大,從昨天提供的官方使用手冊可以觀察到工作電壓大約是在 5V 左右。反觀,無刷馬達是高耗電的產品,輸入電壓可達 12V 、工作時的電流也可達到幾十安培,所以如果按照圖中這樣連接,飛行控制器會無法供給無刷馬達足夠的能源,甚至還可能導致飛行控制器內部電路燒毀。
因此我們必須改變接線方式,由飛行控制器負責供應無刷馬達訊號,用於控制無刷馬達的轉動,但是無刷馬達的供電不可由飛行控制器負責,而須改由電源分配板那邊接過去。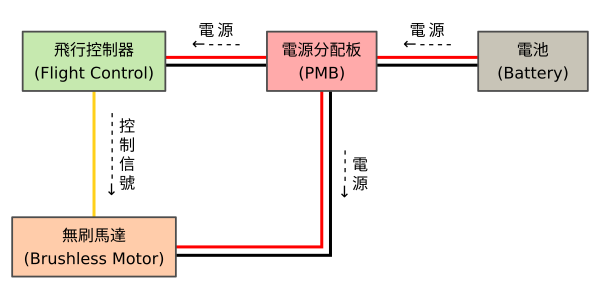
不過,飛行控制器與無刷馬達之間的糾葛還沒結束!
飛行控制器輸出的訊號是單一 PWM 訊號,然而無刷馬達卻是要接受三相 PWM 訊號,因此兩者之間需要轉換。
首先需要解釋什麼是 PWM 訊號(Pulse Width Modulation , PWM),PWM 其實是數位訊號為了實現跟類比一樣的特性而打造的。以我們的無刷馬達舉例來說,馬達會依照供給電壓的不同改變轉速,假設供給 0V 時馬達不旋轉,供給 12V 時馬達可以達到最快轉速。由於我們的電池是 3S 的電池,所以電池在充飽的狀況下是 4.2V * 3 = 12.6V,如果直接從電源分配板拉一條電源線給馬達,就可以取得 12V 沒問題,另外,要供給 0V 給馬達也沒問題,因為直接接地就好。此時會出現一個問題:我希望馬達轉速居中,想供給 6V 時該怎麼辦?我們的電源分配板上可沒有 6V 可以用,也許聰明的讀者會說:那就用降壓器把 12V 降壓成 6V 就好啦!那如果今天我要再略微調降馬達轉速,因此需要供給 3V 的電壓呢?理論上當然可以再加一顆降壓器專責 12V 降壓成 3V!但是我想你大概也開始想:這樣不是辦法,因為飛行控制器可能會要求供給無刷馬達 0V 至 12V 中任一個數值的電壓,總不可能針對每個電壓值都裝對應的降壓器吧?這個問題的解法就是 PWM。
可以先從下圖來看,這是一個電壓對時間的關係圖,在 0~5 秒的時段中,輸出電壓 12V,在 6~10 秒的時段中,輸出電壓 0V。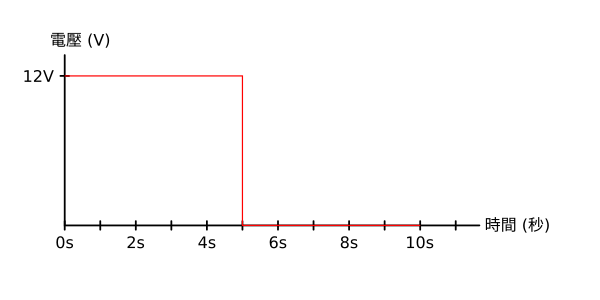
如果我將上圖的頻率增加呢?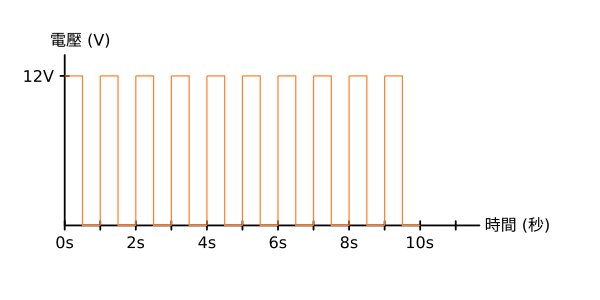
如果我將上圖的頻率再次增加呢?
因為電本身的特性,所以當頻率增加到很大時(其實下圖中的頻率還不夠),實際產生的電壓可以視為 12V 與 0V 的平均,也就是下圖中的藍線 6V ,這部份因為與電學的細節有關,所以就不細講了!簡單來說,PWM 就是透過調整電壓頻率的變化(或直接說快速開關,開就是 12V,關就是 0V)來產生持續的某電壓值,這個某電壓值可以是介於 0V 到 12V 間的任意數值。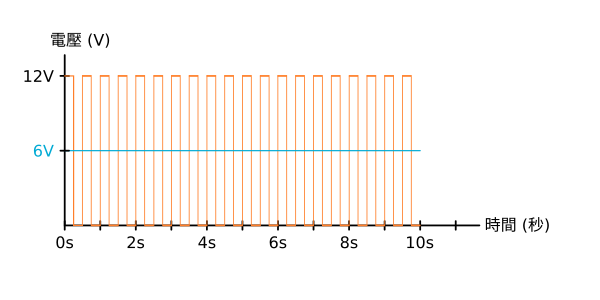
飛行控制器會傳送 PWM 控制訊號,藉由電壓的改變來變更馬達的轉速。然而,從上一篇文章中可以觀察到馬達的輸入為三條線,這三條線並非紅的對應 12V、黑的對應 0V、黃的對應控制訊號,這三條線是三相控制線,需要輪流為這三條線提供 PWM 訊號才能讓馬達轉動。如果覺得文字說明很混亂,可以參考下圖的圖解。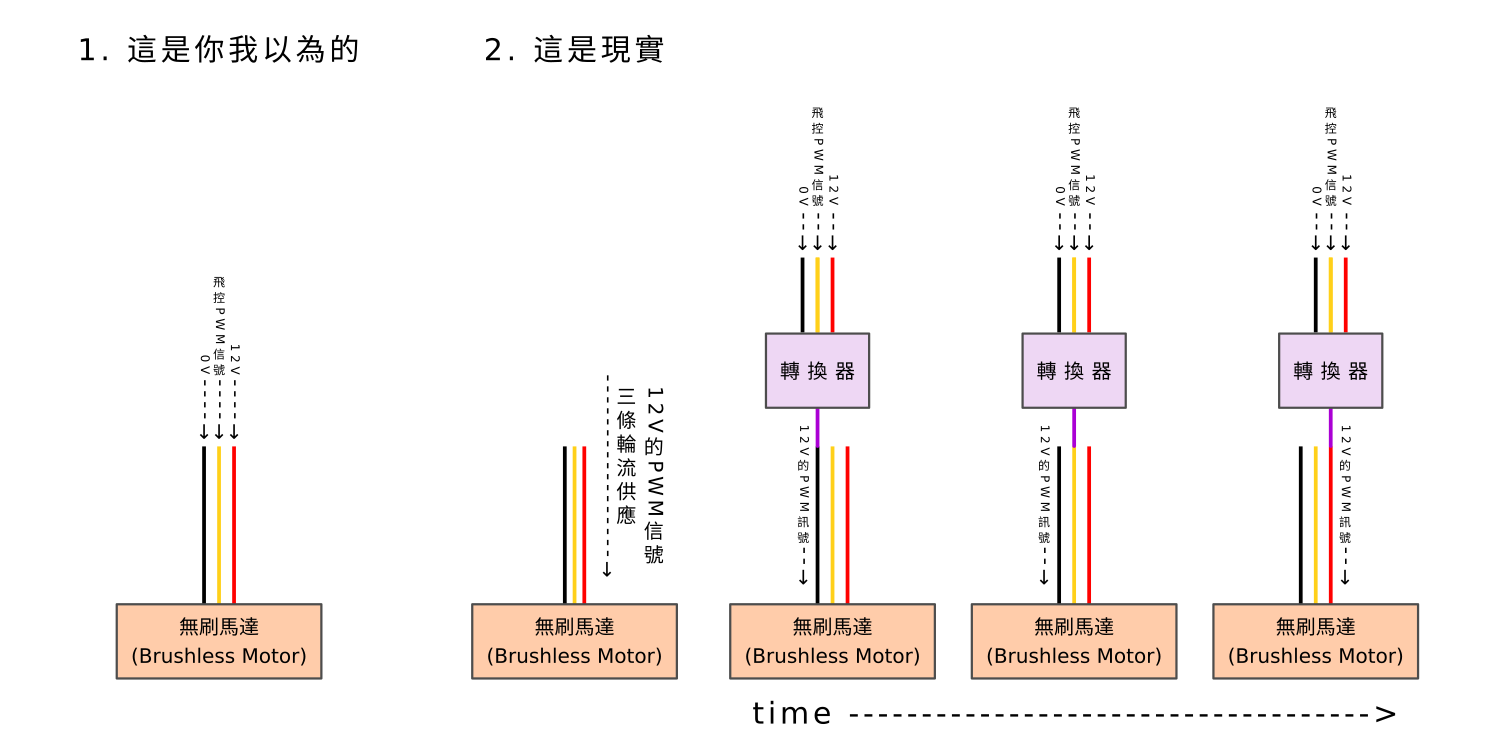
如上圖所示,我們須要一個轉換器來實現圖中展示的功能,因此電子變速器就正式登場了!
電子變速器(Electric Speed Control , ESC)又稱電變,能夠輸入一個直流電源(DC)與一個 PWM 控制訊號,再將其轉換成交流電源輪流輸出至三條連接至馬達的線中。
我使用的電變如下圖所示,因為無從得知電變的型號,所以只能依照常理來判讀各接腳的用途。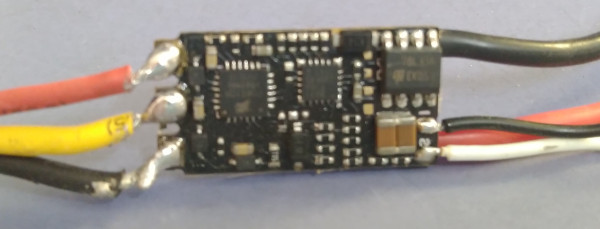
這是電變的另一面。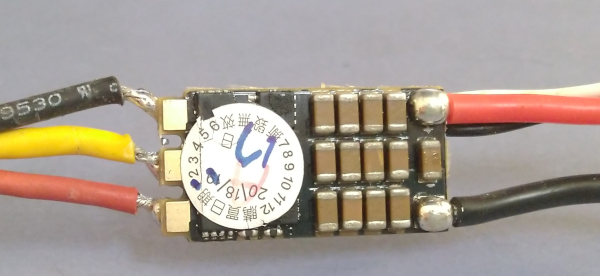
圖中的電流流向是由右至左。右邊較粗的紅線、黑線是用來連接電源分配板、取得 12V 的電源輸入,白線則是連接飛行控制器,用於取得 PWM 控制訊號。左邊的部份則是電子變速器的輸出,會產生交替的大電壓 PWM 訊號,直接連接到馬達的三相線、用於驅動馬達轉動。
以上就是電子變速器的介紹,電子變速器是個必要的部件,他的必要性牽涉到電學以及馬達相關的知識,如果有做過 Arduino 與馬達搭配相關專案的讀者,可能會比較熟悉以上內容。
看完無刷馬達與電子變速器後,緊接著登場的當然就是螺旋槳啦!
我使用的是 ATG 8038 螺旋槳,槳葉片上較光滑、有刻型號的是正面,反之則是背面。
可以觀察到螺旋槳有正槳與反槳之分,槳背逆時針轉時會產生推力的是正槳、槳背順時針轉會產生推力的是反槳。
接下來要介紹的是遙控器(Remote Controller , RC),遙控器用於發送訊號給無人機,告訴無人機要怎麼飛(例如:上升、下降、前進、後退、旋轉、切換飛行模式等)。遙控器細分的話可以拆為遙控器與訊號接收模組,遙控器通常由人拿在手上,由使用者操作遙控器,再由遙控器發送控制訊號,而訊號接收模組則會安裝於無人機上,用於接收遙控器的控制訊號,訊號接收模組會將收到的訊號傳送至飛行控制器,由飛行控制器再下相關的控制訊號給其他部件(例如:馬達)。
之後使用樹莓派連接飛行控制器並直接操作無人機的飛行時,建議保留遙控器的角色,以防樹莓派突然中斷控制訊號(例如:樹莓派因某些原因重新開機)而導致無人機失控。無人機失控時還能拿起遙控器手動操作,讓無人機安全的降落或返航!
以下是我使用的遙控器,RadioLink AT9S 日本手。
這是遙控器電源打開後的畫面,這是已經設定後的結果。
遙控器前方長長的部份是天線(Antenna),用於傳送無線控制訊號,遙控器上有許多搖桿、開關與旋鈕,之後實際操作時會再詳細介紹。值得注意的是,遙控器分為日本手與美國手,差異只在於油門與方向控制的位置互換而已。圖中是日本手的遙控器,因此油門(又稱 Throttle,控制無人機上升或下降)搖桿在遙控器的右半邊,而控制方向的搖桿則在遙控器的左半邊。如果是美國手的遙控器,則油門搖桿與控制方向的搖桿位置會互換。
以下是搭配遙控器使用的控制訊號接收模組 RadioLink R12DSM,右邊兩根長長的是無線訊號接收天線,左邊則是用於連接飛行控制器的杜邦針腳。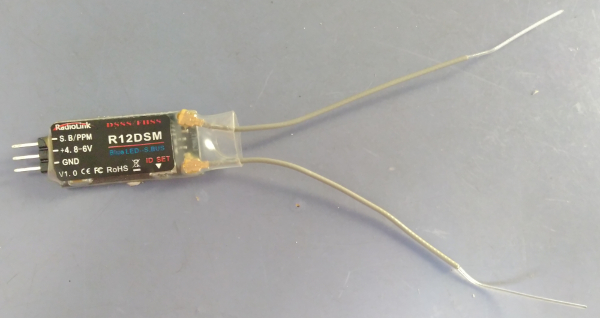
數據傳輸模組通(Telemetry Radio Module , Telemetry / Telem)常簡稱數傳,用於讓使用者即時與無人機上的飛行控制器溝通,取得無人機當前的相關資訊,甚至也可以發送控制訊號給飛行控制器用以控制無人機的飛行。數傳模組並不是一定要有,只是如果有了會很方便,畢竟無人機一飛起來,能與之連線的東西不多,就剩遙控器與數傳,遙控器上的開關按鈕很制式,數傳相對較有彈性。
以下是我所用的數傳模組 Holybro Telemetry Radio V3 。
數傳模組通常是兩個一對(上圖僅是一個數傳模組),一個安裝於無人機上,並與飛行控制器直接連接,另一個則是留在使用者手上,直接與電腦連接,使用者可以透過電腦上的專用軟體與飛行控制器連線,用以取得相關資訊以及發送新指令。
兩個數傳模組原則上只要訊號發射頻率相同(甚至型號相同,如上圖是 915MHz 的發射頻率),基本上就可以互相通訊,數傳模組沒有主從之分,因此任選一個數傳模組連接到飛行控制器上,另一個連接到使用者手中的電腦就可以通訊。
最後提到的是機架(Frame),以上提到了這麼多部件,需要找個東西把他們湊在一起,畢竟總不可能把無人機上所有的部件都黏到飛行控制器上吧!這就好像一台電腦要有機殼一樣,總不會期待硬碟、光碟機、讀卡機等設備都黏在主機板上,就可以省下了一個機殼了!
機架的材質我使用的碳纖維(Carbon Fiber),碳纖維相對來說較為堅硬、有一定軔性,能夠抵抗外力衝擊,重量也沒有很重。相較於金屬而言,金屬有些過於重,還會有吸收太陽熱能,進而導致機架上的各部件被加熱的危機。塑膠雖然相對輕,但是用久了容易變形,長時間被太陽曬也容易變質脆化。
關於碳纖維的詳盡介紹,可以參閱 這個影片 。用來製作無人機骨架的碳纖維,通常會被編織成網狀,並且將多層網狀的碳纖維壓合以增加堅固程度。不過碳纖維也有一個缺點,就是當你摔機之後,碳纖維斷掉會產生很多小碎屑,這些碎屑很尖,而且有時候清理不易,有些粉狀的碳纖維碎屑還會沾到手上,將你的手「染黑」。
我聽起來很了解碳纖維斷裂後有多悲劇?當然,我可是摔機常客!
機架的形狀也是各式各樣,通常可分為兩種:X 型與 H 型。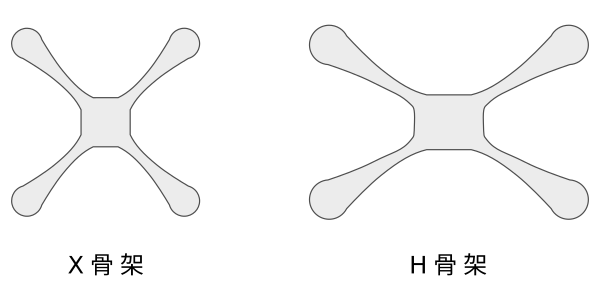
X 型骨架的機架上下、左右均對稱,因此呈現漂亮的 X 形,有利於無人機做靈活的飛行表演或是在障礙物多的地方穿梭飛行,不過 X 型骨架中間的部份通常是方形的而且也比較小,所以放置部件的空間有限。H 型骨架通常是較扁的 X 形狀,中間的部份通常是長方形的而且也比較寬,所以放置部件的空間較多。
我使用的是 H380 機架,材質是碳纖維,下圖僅展示部份組件,重複的組件只放一個。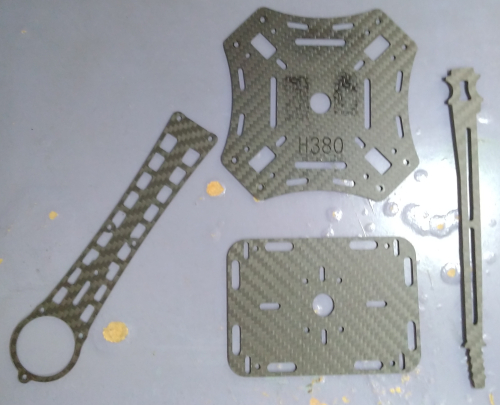
如果對於文章內容有建議、糾錯或圖源標示不正確的問題,歡迎參考 [機派X] Day 1 嘗試與文章作者聯絡。
想看更多本系列的文章,請連結至 [機派X] Day 1 查看大綱。

