今天是機派X系列文章的第十三天。
昨天終於介紹完無人機上的重要部件,從今天開始會動手組裝無人機,組裝的過程中也會分享一些無人機運作的相關原理。
本篇大綱:
正式開始安裝前,我們要先規劃一下每一個部件要安裝在哪個地方,這樣之後就可以按圖施工、不用怕裝錯。
以下是各部件具體位置的抽象畫。
在 2D 繪圖軟體繪製 3D 圖真的很難,麻煩大家發揮一下想像力就能看懂這張圖!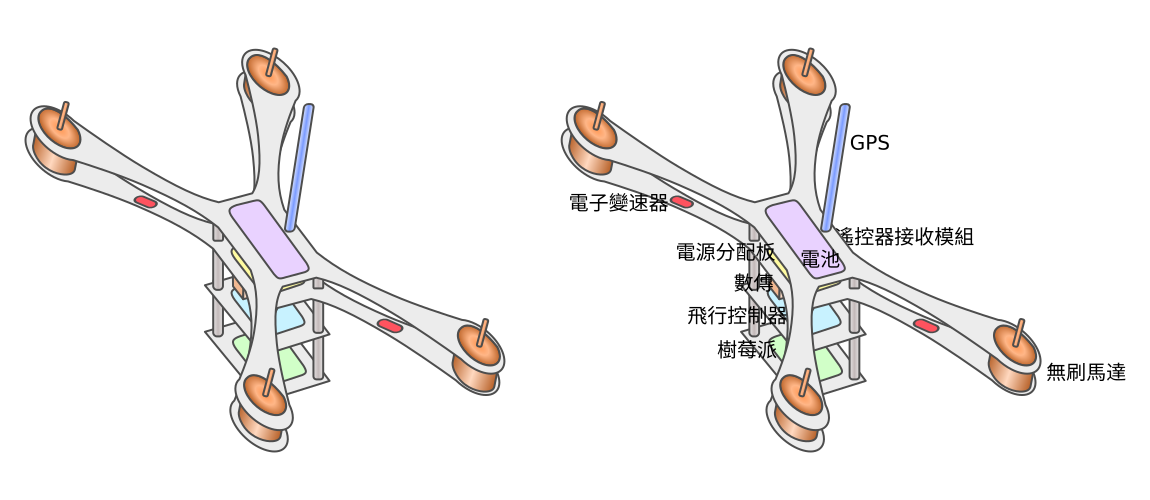
首先,我們從電源著手,開始安裝電源分配板。
取出一個中央底板,並在底板上鎖上電源分配板,由於碳纖維是導體,所以兩者之間使用尼龍柱墊高,以防止電源分配板上的焊點直接接觸碳纖維底板而發生短路的情況。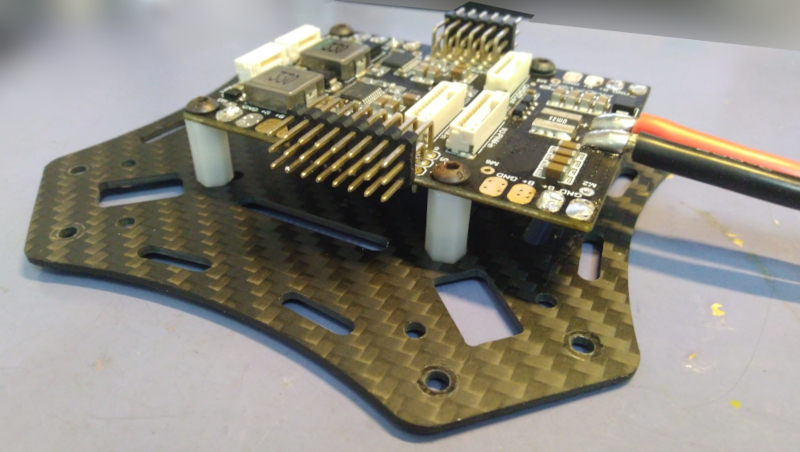
換個角度看,確保尼龍柱高度足夠。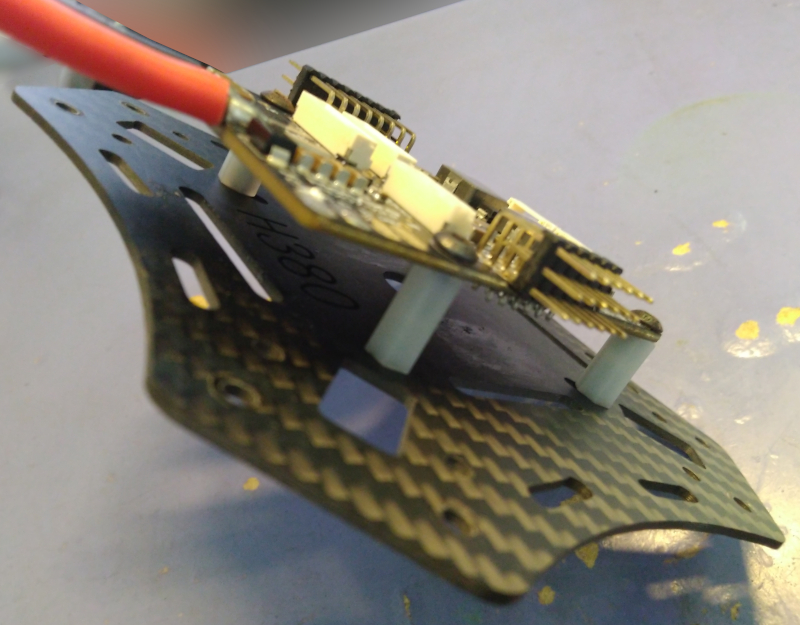
接著安裝機臂上的無刷馬達。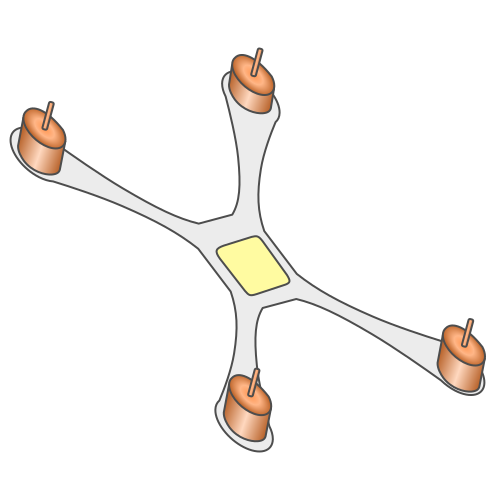
用螺絲直接將無刷馬達固定於碳纖維骨架上,四個機臂都要做、作法都相同,因此這邊僅示範其中一個。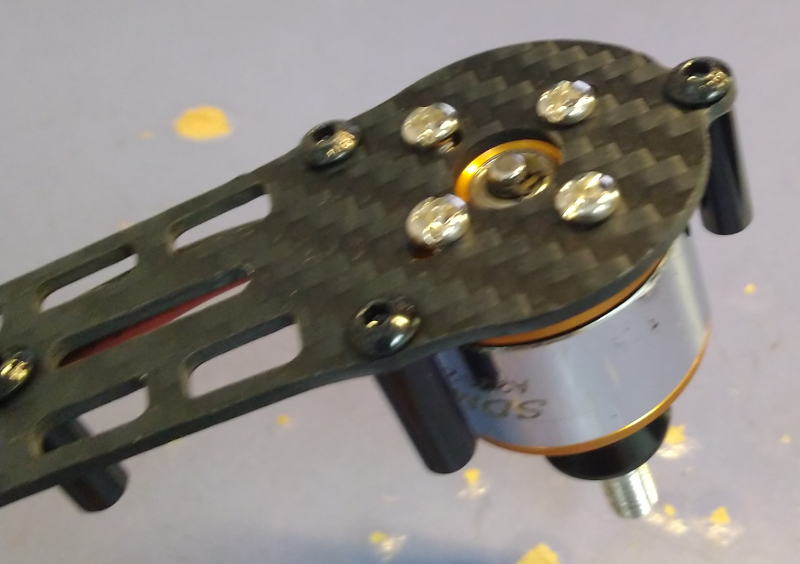
固定完成後,無刷馬達的線會是歪向一邊的,這樣才能避開機架上已經開好的橫條孔,那個孔是之後要安裝機架的支撐美腿用的。
另外,為了方便佈線,我已經把用於固定機臂上片的金屬柱鎖上了!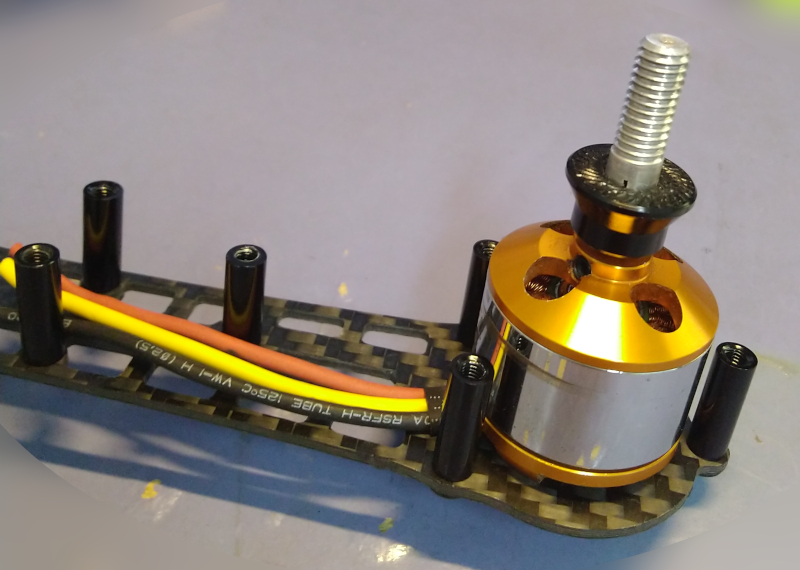
安裝無刷馬達與電源分配板之間的電子變速器。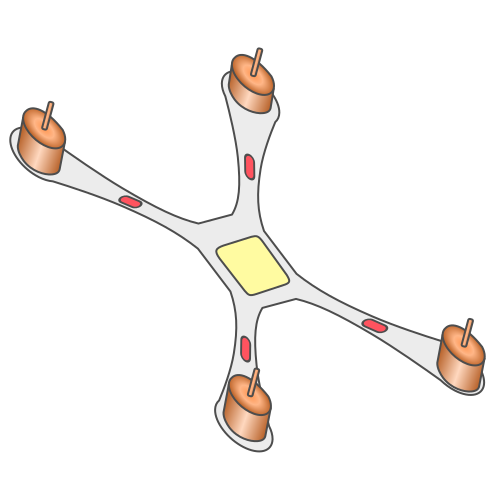
將無刷馬達的三相線依序焊接到電子變速器的輸出端。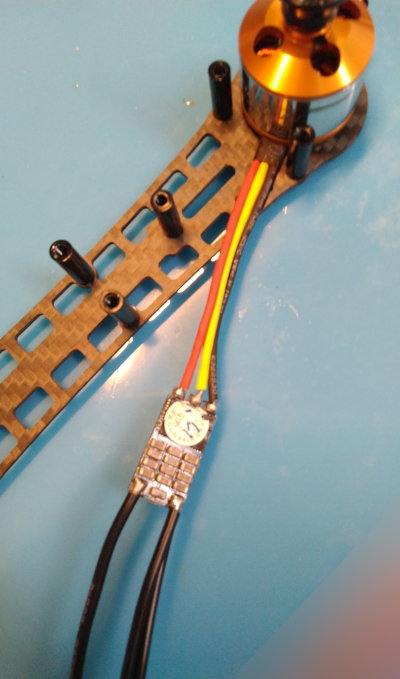
電子變速器的輸入端有三條線,分別用於提供 12V 電源與 PWM 形式的轉速控制訊號。(這邊如果覺得滿頭問號,可以到前一篇文章中看一下電子變速器小節的說明。)
這邊的三條輸入端都要接到電源分配板上,也許你會覺得奇怪:PWM 形式的轉速控制訊號不是應該由飛行控制器提供嗎?沒錯,不過因為我使用的這塊電源分配板有一個孔位可以將飛行控制器的馬達轉速控制訊號轉送至電源分配板的 M1 ~ M8 腳位上,因此這邊我們直接使用電源分配板的 M1 ~ M8 腳位!Mx 代表一顆馬達的轉速控制訊號,x 是馬達編號,這塊電源分配板最多可支援八顆馬達,但我們只需要使用四顆就好,因此選擇 M1 ~ M4 來使用。我這邊由於線材不足,因此都用黑色電線,請大家見諒。如果資源充足的狀況下,建議用顏色區分一下不同功能的電線。
另外,電子變速器若直接接觸碳纖維機架也可能會發生短路,因此用熱縮管將其包覆再用束帶固定在機架上。
四個機臂都完成後,看起來會是這樣。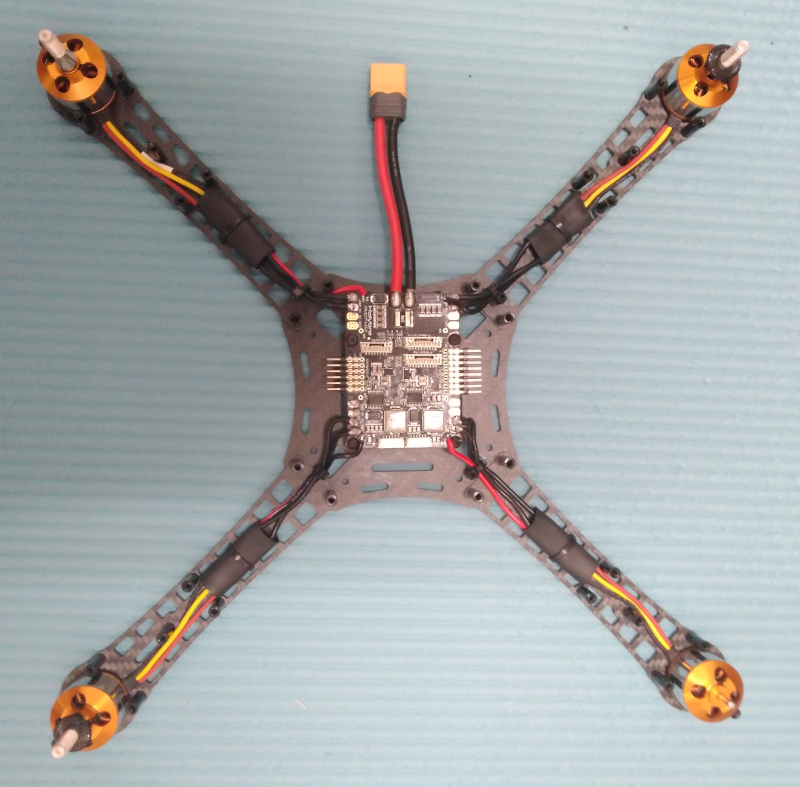
完成機臂的底層後,接下來就可以安裝機架的支撐腳,安裝的過程可能會需要鎚子輕敲一下才能將支撐腳卡入機臂的底層。
還要將機臂的頂層也裝上去,機架的支撐腳才算完成安裝,不然支撐腳隨時都可能會從機臂的底層鬆脫。
從側面看會比較清楚。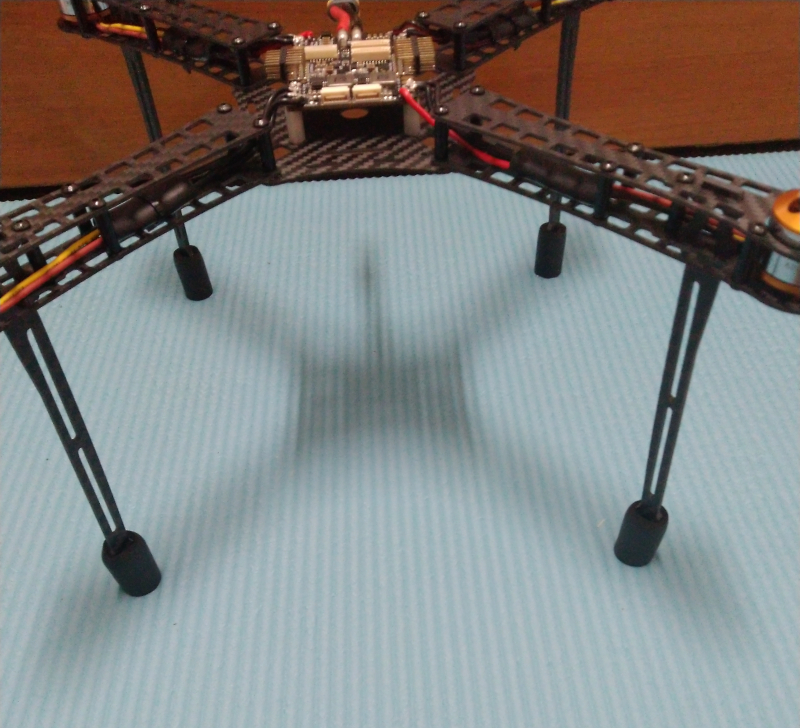
以下就是今日的無人機安裝進度,也許你看這篇文章只需要三分鐘,但其實我實際操作超過三小時。有機會的話,建議讀者實際操作看看。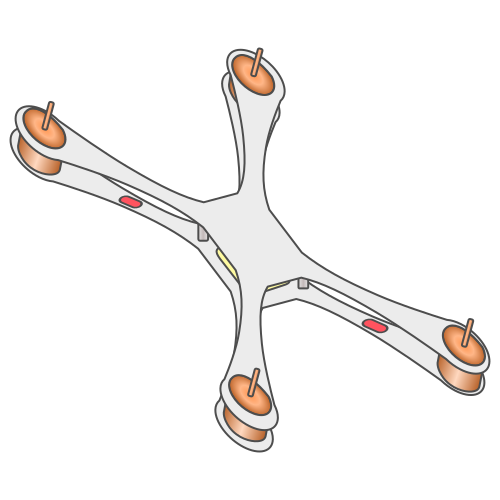
如果對於文章內容有建議、糾錯或圖源標示不正確的問題,歡迎參考 [機派X] Day 1 嘗試與文章作者聯絡。
想看更多本系列的文章,請連結至 [機派X] Day 1 查看大綱。


 iThome鐵人賽
iThome鐵人賽