過往在進行雲端部署時,有時候需要複製出多套一樣的基礎架構,例如包含VPC、VM、LoadBalancer、DB等等的架構,那在過往的做法,通常需要像是苦力般一個一個搭建好,頂多VM的部分可以通過Snapshot來進行複製,其餘的部分都要進行人工設定。因此為了解決這樣的問題,筆者決定要介紹ROS這樣的服務,這個服務類似於AWS的CloudFormation,可以透過YAML、JASON等語言,來進行規模化、統一的基礎建設部署
ROS是阿里雲提供的資源整合服務,通過以下三點組合而成:
ROS元件關係示意圖: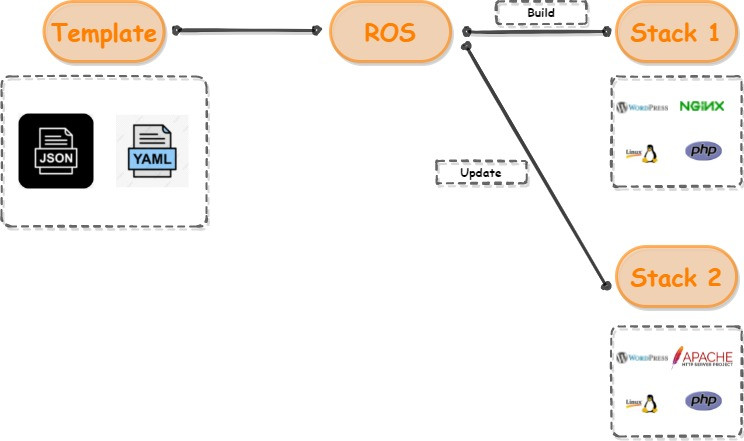
找到彈性編排中的資源編排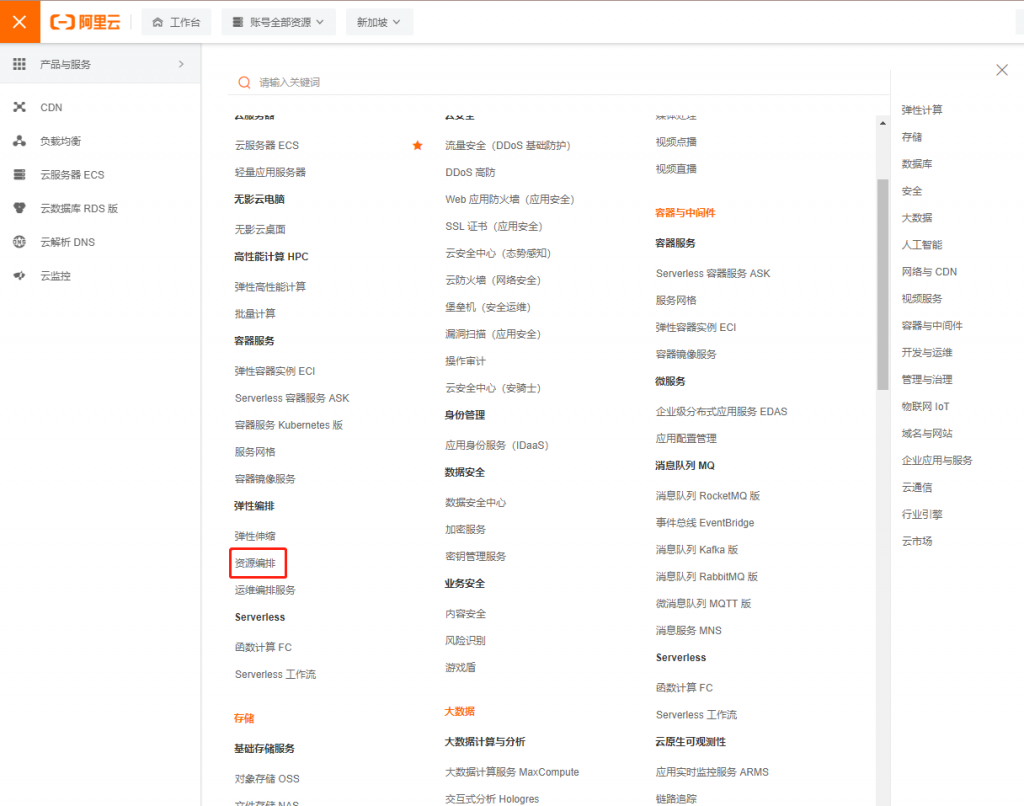
在資源編排中有相當多的引導工具,並且分為自定義以及預先定義的模板,可以根據自己的需求來點選,那這次筆者會先點選資源棧來進行創建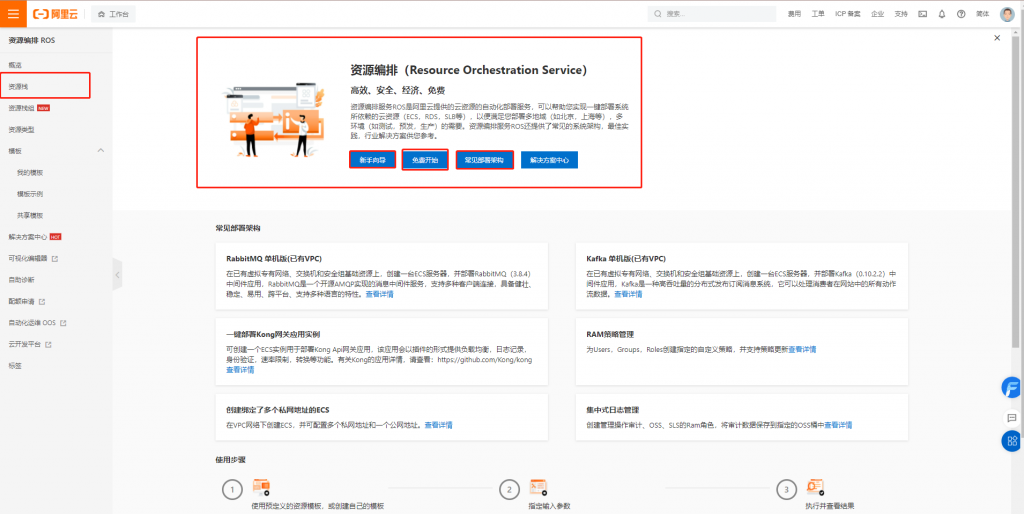
創建資源棧後,我會使用新資源來進行創建,因為選擇使用現有資源會需要將目前正在運行的資源進行導入的動作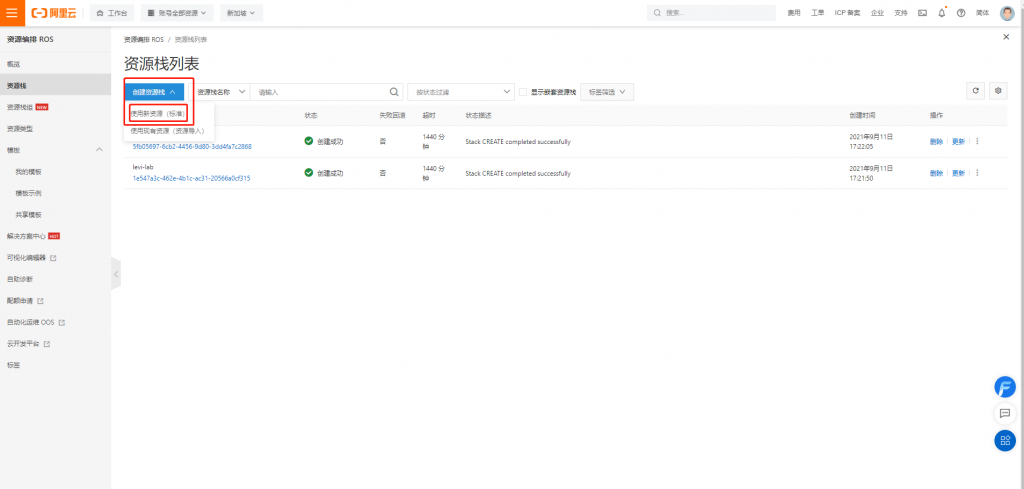
選擇示例模板,這次模板採用最經典的LNMP (Linux、Nginx、MySQL、PHP)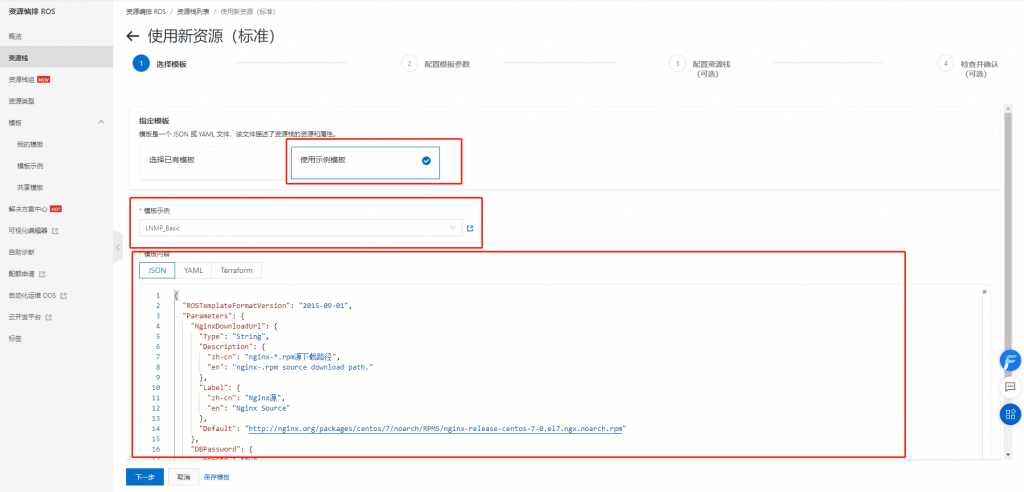
配置模板的參數,這邊可以直接讓我根據模板進行內容填寫,而不用在YAML或者JSON的模板上填入參數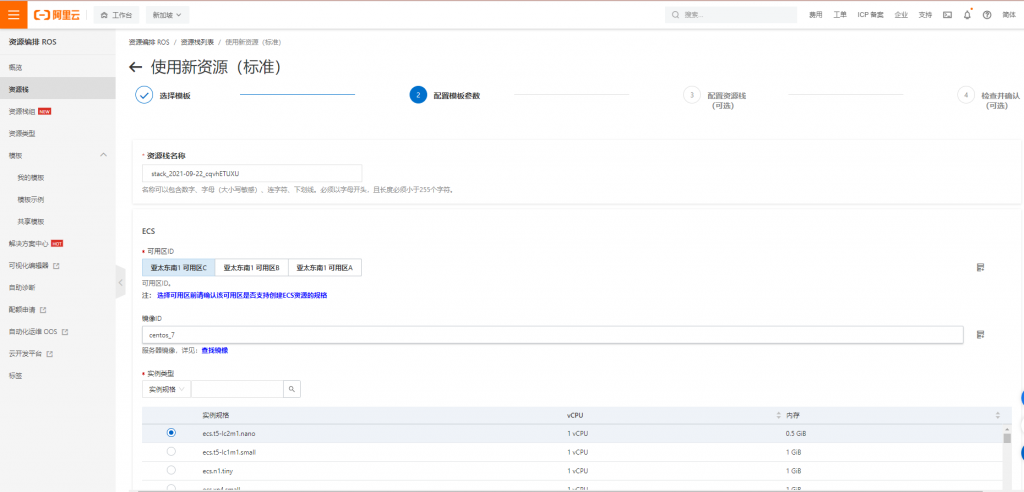
繼續依照提示填入相關參數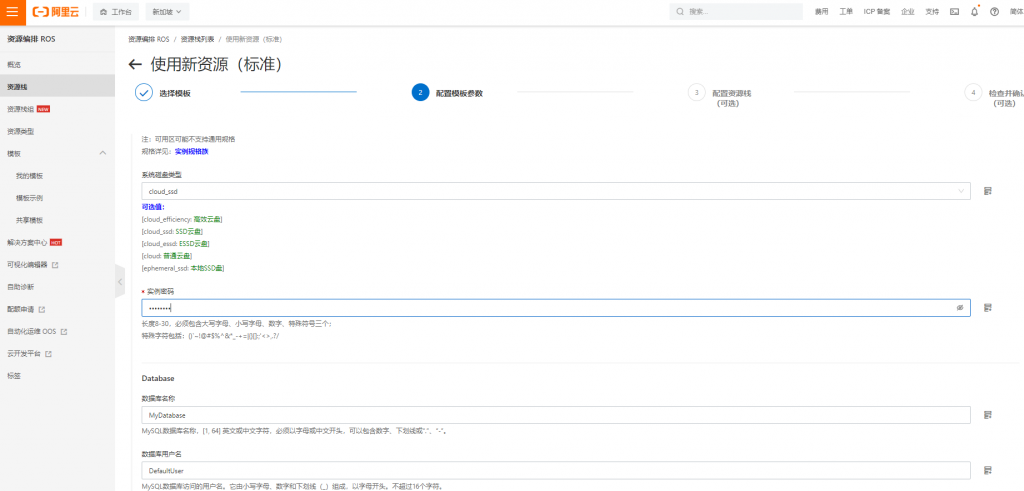
填選完成後,直接選擇創建;若選擇下一步則是有進階設定的選項可以進行調整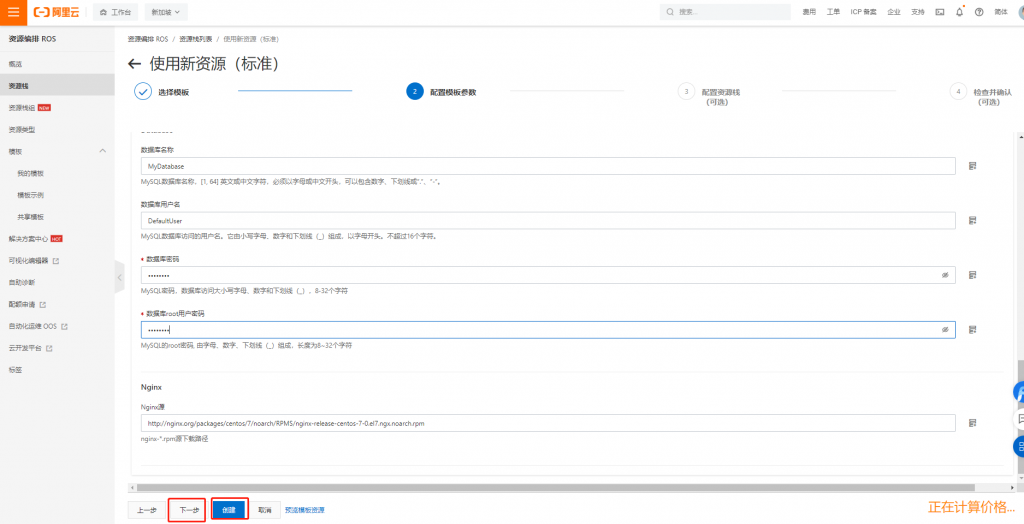
選擇下一步後,這邊可以啟用以下設定,資源棧的策略、失敗回滾措施、刪除保護措施、RAM角色指派等等,但此次實作筆者皆保持預設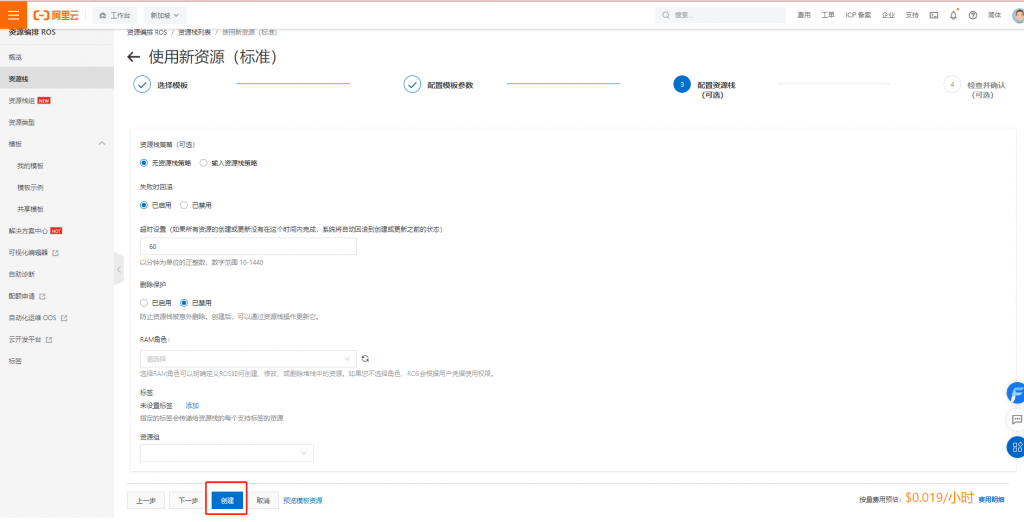
創建後會進入此頁面,按回上一頁
等待一下,若創建成功則會顯示綠色勾勾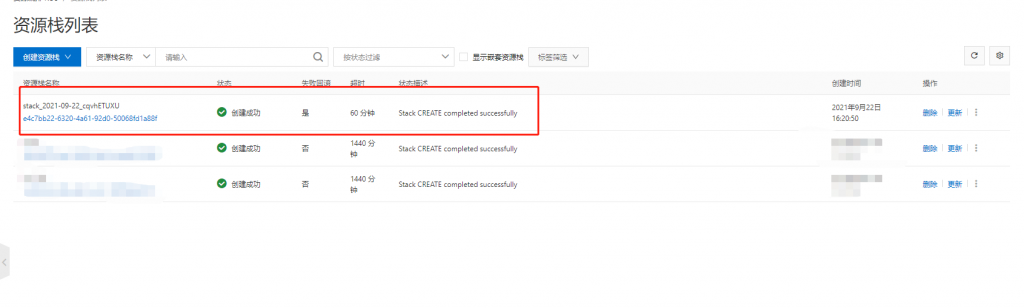
點選到資源頁面,可以確認此資源棧包含哪些資源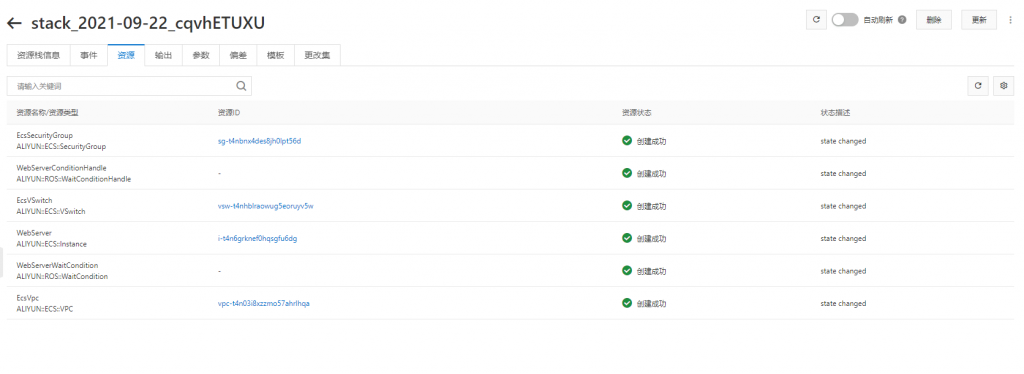
選擇參數頁面,可以查看在這個資源棧中的所有參數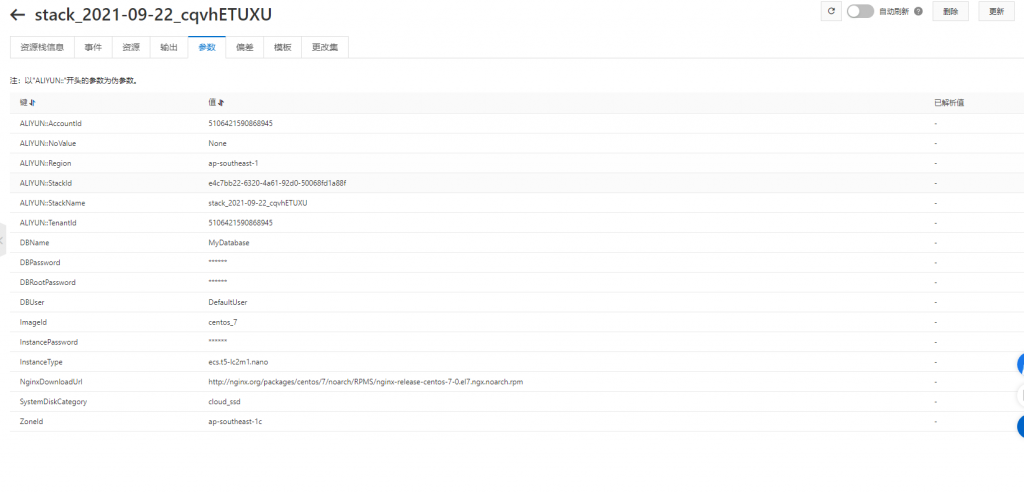
資源偏差頁面,若資源進行相關的設定與調整,這邊會顯示資源偏差,可以根據需求進行偏差檢查並進行調整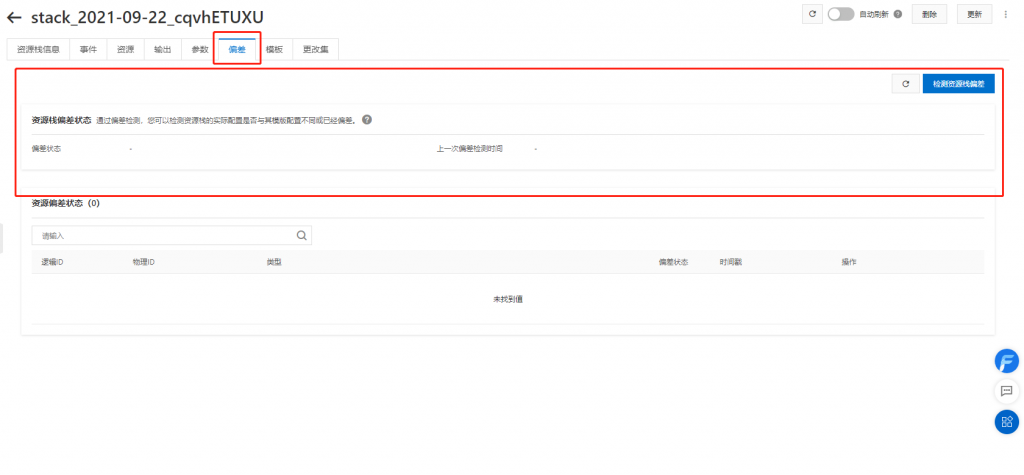
點選模板頁面,可以看到目前資源的JSON、YAML檔
在這邊可以看到模板頁面的可視化架構圖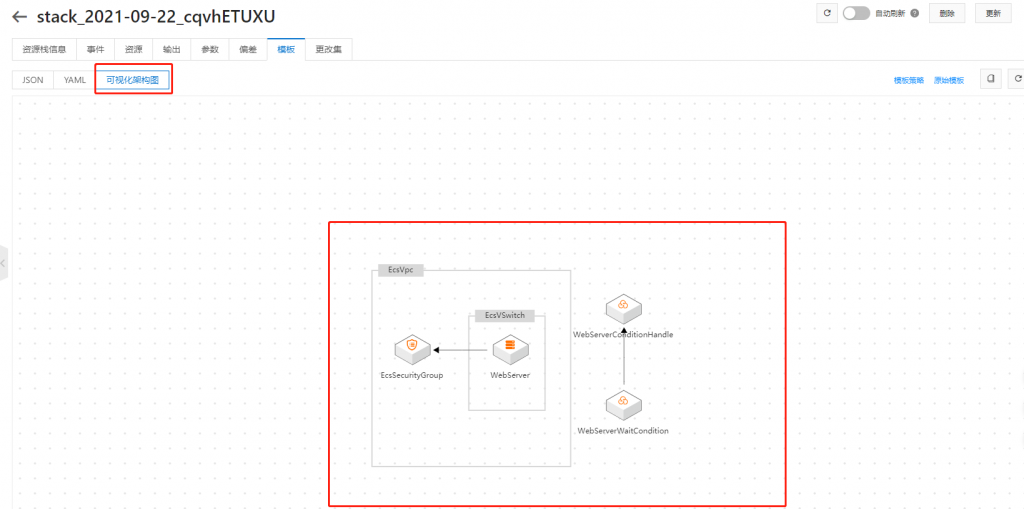
根據輸出的網頁來查看是否創建成功
能夠看到web頁面,代表創建成功囉!
接下來來創建屬於自己的模板,選擇模板 - 我的模板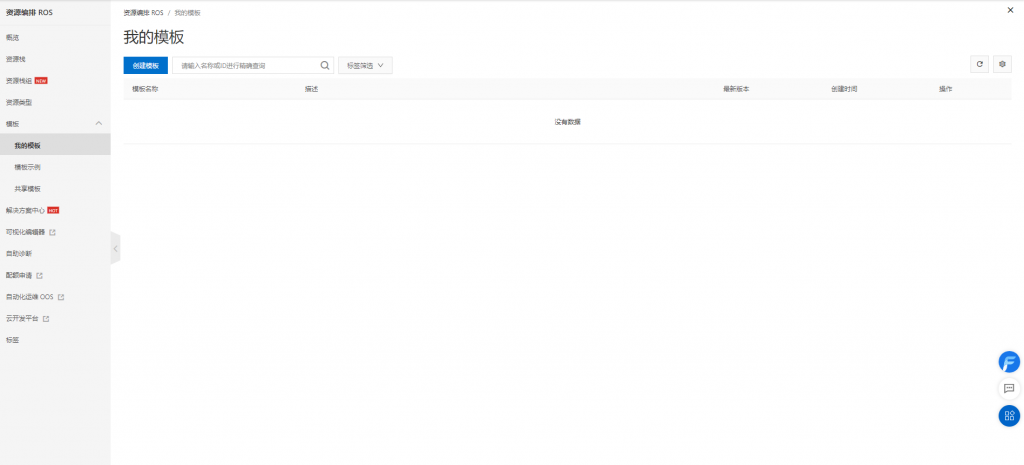
選擇創建模板,並根據自己的需求來進行調整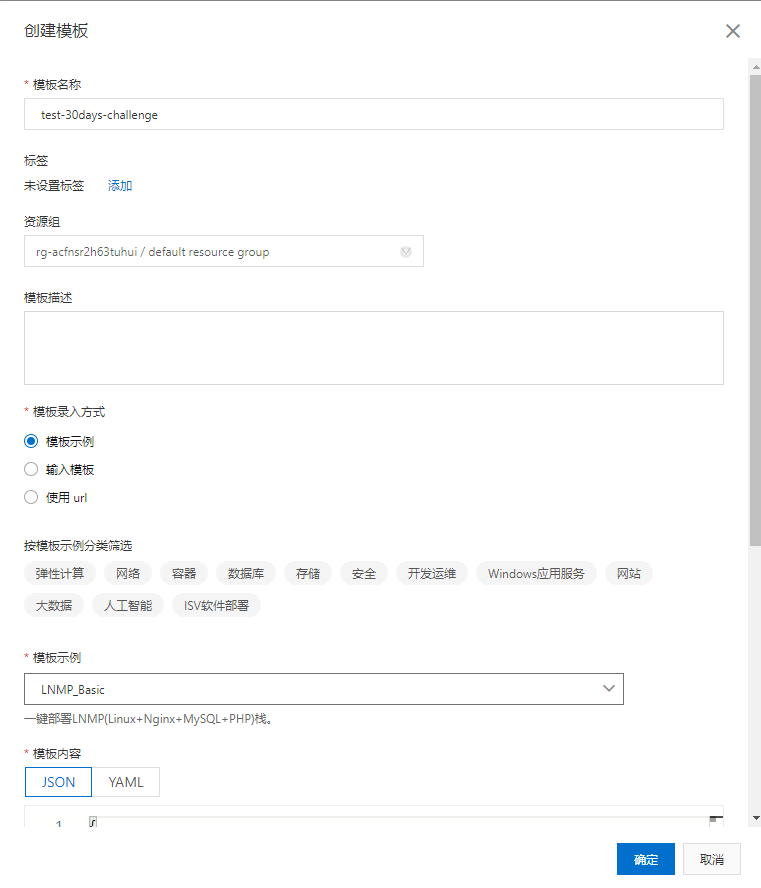
ROS也提供了一個很直覺化不錯的服務:可以通過可視化編輯器來直接使用圖形來完成架構圖,並直接作為模板搭建,選擇可視化編輯器
選擇打開我的模板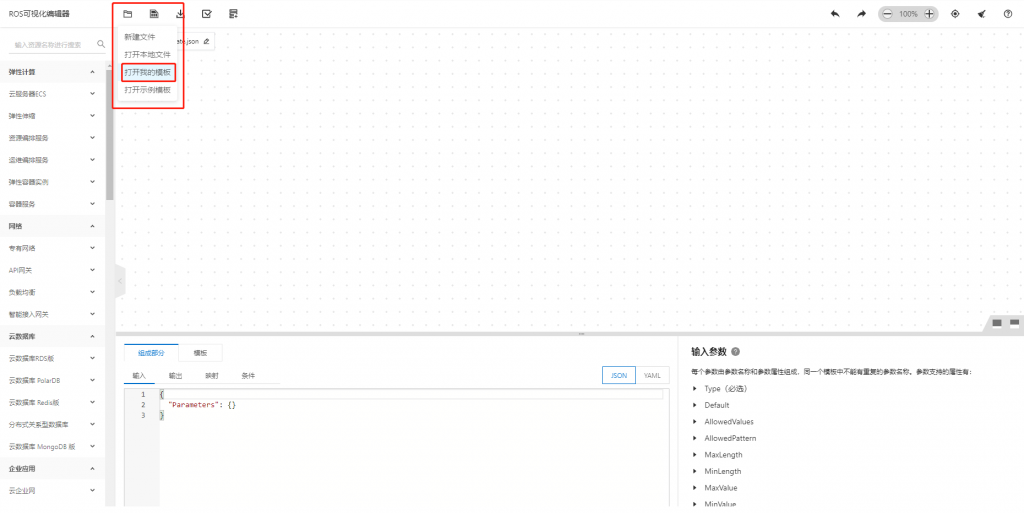
模板展開的狀態,可以進行編輯與更改,並搭配下方的YAML、JSON檔來輔助設定,最終可以儲存成新的模板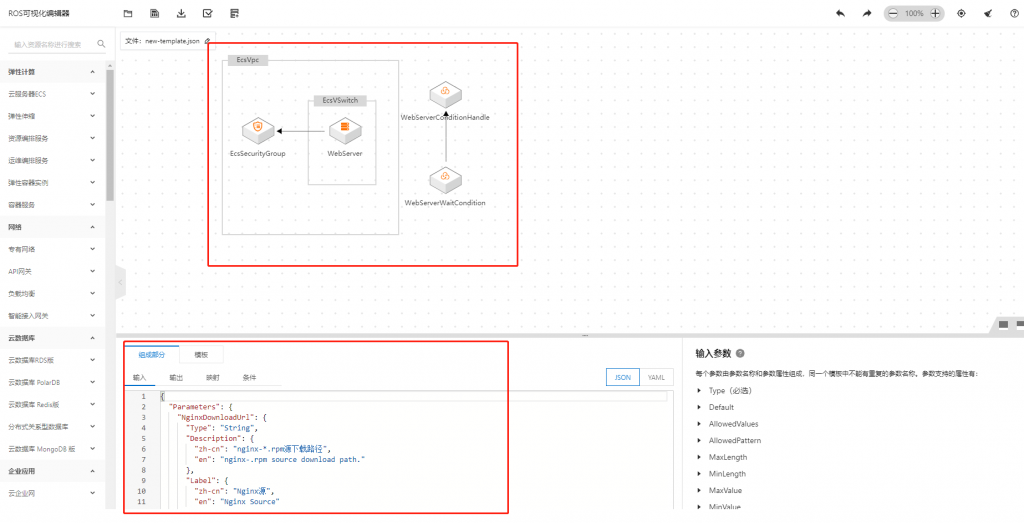


 iThome鐵人賽
iThome鐵人賽