同樣我們藉由web介面搭配WebRTC去控制FRC車子的輪軸轉動,確定我們可以用前面幾篇提到的方式,將整個從雲端至地端的控制,串接起來。
Python程式主要就是putNumber到SmartDashboard,而Java程式主要就是getNumber然後做車子相對應的動作。
比如我們將網頁上,點擊上下左右的按鈕,分別以不同增加或減少x,y座標值,傳給edge端的Python程式去設定NetworkTables。
self.sd.putNumber("S-Forward", pub_msg.point.x); #前後移動
self.sd.putNumber("S-Azimuth", pub_msg.point.y); #左右移動
S-Forward 與 S-Azimuth是之前岡山高中的學生就寫好的組合鍵。
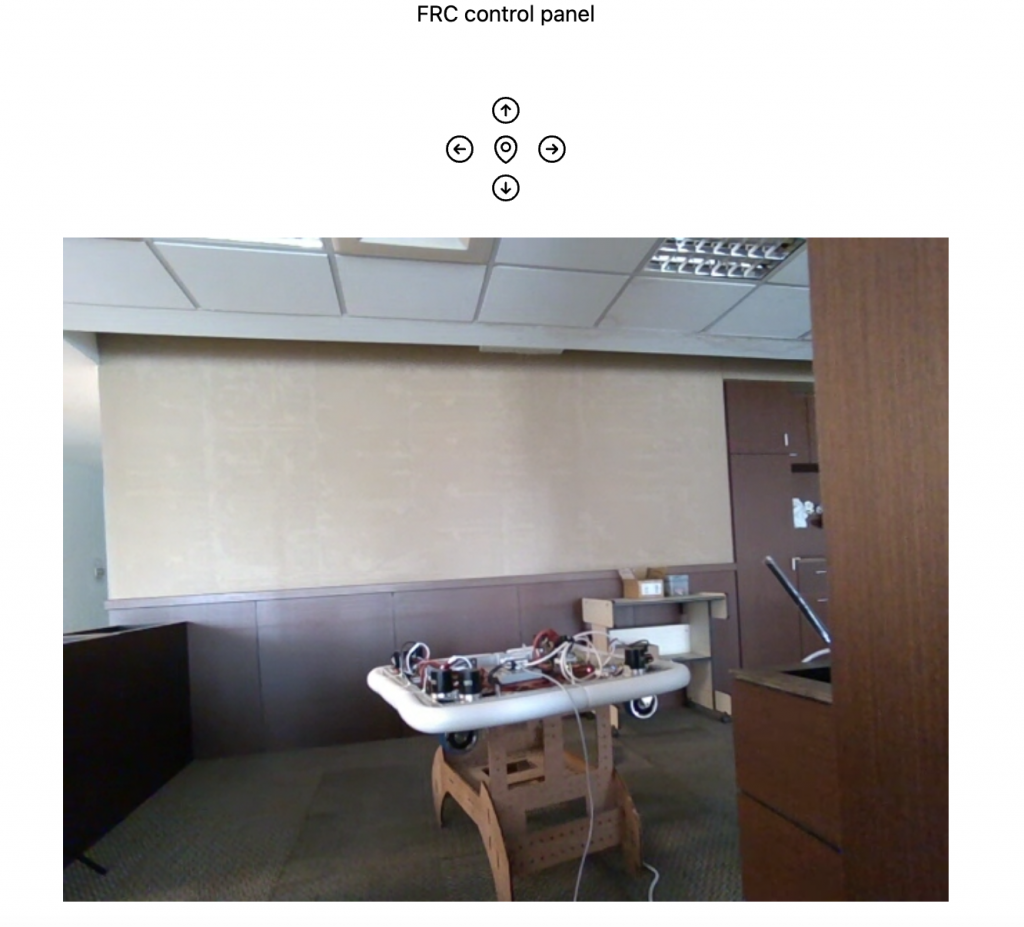
另外,把車子架起來的原因是,擔心摩擦地板聲音太大,也會傷到地板。
(目前看到只有底盤的部份,之後會在上面加上手臂,可以抓取物件或者投籃。)

