部署Apply pretrained model至edge device的部份,目前FRC車子上一樣仍還沒有完成。先用以下內容說明,與成大學生嘉軒討論的內容。
當Jenkins trigger greengrass的deployment指令後,會更新local server的component code(透過更新greengrass的recipe.yaml)與docker-compose設定(包含不同entrypoint指令執行),並執行新的deployment.json產生新的部署,讓其去拉取指定的model與AI程式(gg_frc_controller)。
version: "3"
services:
gg_frc_controller:
build:
context: ./
image: gg-frc-controller:latest
command: python main.py --file ./AI --model ./model
greengrass_bridge:
image: $ECR_COMPONENT:$VERSION
command: ros2 launch greengrass_bridge greengrass_bridge.launch.py ros_topics:="['initialpose','clicked_point']" iot_topics:="['initialpose','clicked_point']" thing_name:="$THING_NAME"
environment:
- AWS_REGION
- SVCUID
- AWS_GG_NUCLEUS_DOMAIN_SOCKET_FILEPATH_FOR_COMPONENT
- AWS_CONTAINER_AUTHORIZATION_TOKEN
- AWS_CONTAINER_CREDENTIALS_FULL_URI
volumes:
- "/greengrass/v2/ipc.socket:/greengrass/v2/ipc.socket"
deployment.json如下:
{
"targetArn": "arn:aws:iot:$AWS_REGION:$AWS_ACCOUNT_ID:thing/$THING_NAME",
"deploymentName": "Deployment for $THING_NAME",
"components": {
"$ECR_COMPONENT": {
"componentVersion": "$VERSION"
},
"aws.greengrass.Cli": {
"componentVersion": "2.7.0"
}
},
"deploymentPolicies": {
"failureHandlingPolicy": "DO_NOTHING",
"componentUpdatePolicy": {
"timeoutInSeconds": 60,
"action": "NOTIFY_COMPONENTS"
},
"configurationValidationPolicy": {
"timeoutInSeconds": 60
}
},
"iotJobConfiguration": {}
}
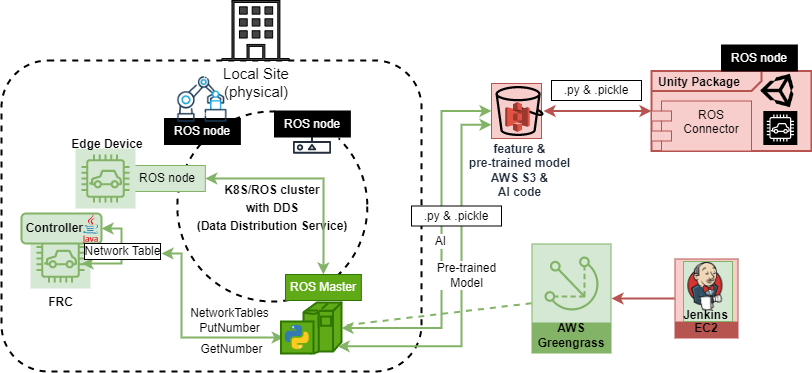
上圖的流程透過Unity pretrained model預測出來的馬達轉速(.pickle),會傳到之前篇章提到的subscribe_from_iot那隻python程式, python再透過pynetworktables寫進networktables, java controller程式再讀取networktables的值,來驅動FRC馬達,完成model的Apply。

