基於我自己的使用經驗,來練習如何在ROS2寫一個間單且包含Topic(publisher node)、Topic(subscriber node)、Parameter、launch的練習吧。
今天先處理workspace、package、publisher/subscriber node各寫一個cpp,按照官網步驟教學,但會帶入一些我的使用經驗。
開一個terminal
# 設定環境變數
source /opt/ros/foxy/setup.bash
mkdir -p ~/ej_ros2_ws/src
cd ~/ej_ros2_ws/src
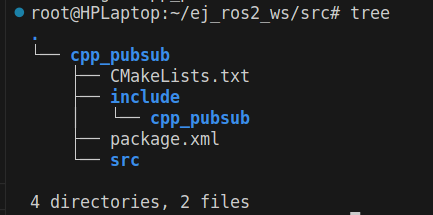
ros2 pkg create --build-type ament_cmake cpp_pubsub
cd ~/ej_ros2_ws/src/cpp_pubsub/src
# 抓取官方提供的publisher
# 也可以自己新建一個cpp檔複製貼上程式碼,一樣意思
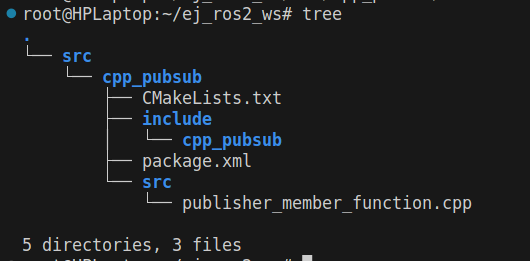
wget -O publisher_member_function.cpp https://raw.githubusercontent.com/ros2/examples/foxy/rclcpp/topics/minimal_publisher/member_function.cpp
先蕪存菁一下,非原始程式碼~~只留下我想補充的地方。刪除的地方用//...帶過
//...
#include "rclcpp/rclcpp.hpp" # ROS2 C++ 標準函式庫
#include "std_msgs/msg/string.hpp" # ROS2 標準訊息函式庫—字串格式
// 如果要發布或訂閱別的格式,就要#include 指定格式,例如:
#include "sensor_msgs/msg/point_cloud2.hpp" # ROS2 感測器函式庫—點雲格式
//...
// ROS2用物件導向形式作為一個節點,都基於rclcpp::Node
class MinimalPublisher : public rclcpp::Node
{
public:
//物件導向預設建構函式,這裡有預設節點的名字minimal_publisher
MinimalPublisher()
: Node("minimal_publisher"), count_(0)
{
publisher_ = this->create_publisher<std_msgs::msg::String>("topic", 10);//topic是話題名稱,10是備份訊息的儲存佇列大小
timer_ = this->create_wall_timer(
500ms, std::bind(&MinimalPublisher::timer_callback, this));
//每500毫秒送一次訊息
}
private:
//timer_callback() 會在timer_不斷被呼叫直到程式中止
void timer_callback()
{
auto message = std_msgs::msg::String();
//...
//ROS2 輸出文字在terminal上的方法
RCLCPP_INFO(this->get_logger(), "Publishing: '%s'", 'str');
// 將訊息發布出去
publisher_->publish(message);
}
//timer_和publisher_宣告於此
rclcpp::TimerBase::SharedPtr timer_;
//publisher_傳送的訊息格式在這被宣告~~~<std_msgs::msg::String>
//如果是點雲的話以此類推<sensor_msgs::msg::PointCloud2>
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_;
//...
};
//昨天提到的arguments 就是這裡的int argc, char * argv[] 提到而已~
int main(int argc, char * argv[])
{
// 主程式內基本上就是長這樣而已,除非想寫arguments?但個人習慣用Parameter
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<MinimalPublisher>());
rclcpp::shutdown();
return 0;
}
先把subscriber node也補上
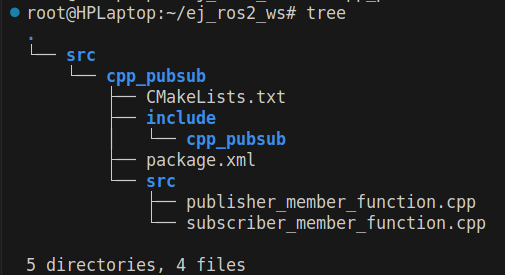
wget -O subscriber_member_function.cpp https://raw.githubusercontent.com/ros2/examples/foxy/rclcpp/topics/minimal_subscriber/member_function.cpp
提過得就跳過~~
//...
//這個參數(?)在我用pcl時會出錯 error: reference to '_1' is ambiguous
using std::placeholders::_1;
//在include <pcl>眾多函式庫前先放這段,應該就可以解決了
//#define BOOST_BIND_NO_PLACEHOLDERS
//我沒理解錯的話是'_1'和pcl中的衝突了
class MinimalSubscriber : public rclcpp::Node
{
public:
MinimalSubscriber()
: Node("minimal_subscriber")
{
subscription_ = this->create_subscription<std_msgs::msg::String>(
"topic", 10, std::bind(&MinimalSubscriber::topic_callback, this, _1));
//topic 是話題名稱,10 是保留訊息的儲存佇列大小
}
private:
void topic_callback(const std_msgs::msg::String::SharedPtr msg) const
{
//可以上網搜尋std_msgs::msg::String 有哪些內容可以用
RCLCPP_INFO(this->get_logger(), "I heard: '%s'", msg->data.c_str());
}
//相較發布者 rclcpp::Publisher
rclcpp::Subscription<std_msgs::msg::String>::SharedPtr subscription_;
};
//...
只有data變數~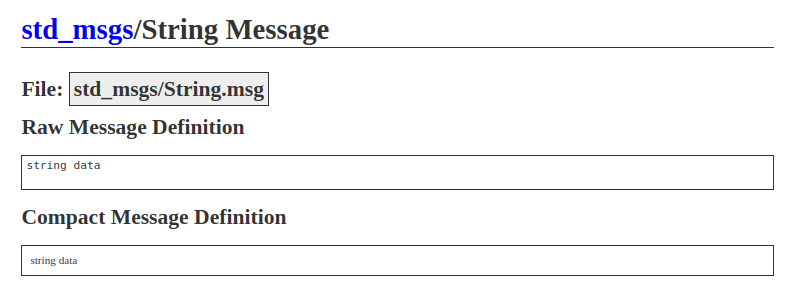
之後pcl實作時在詳細介紹~先放給大家比較!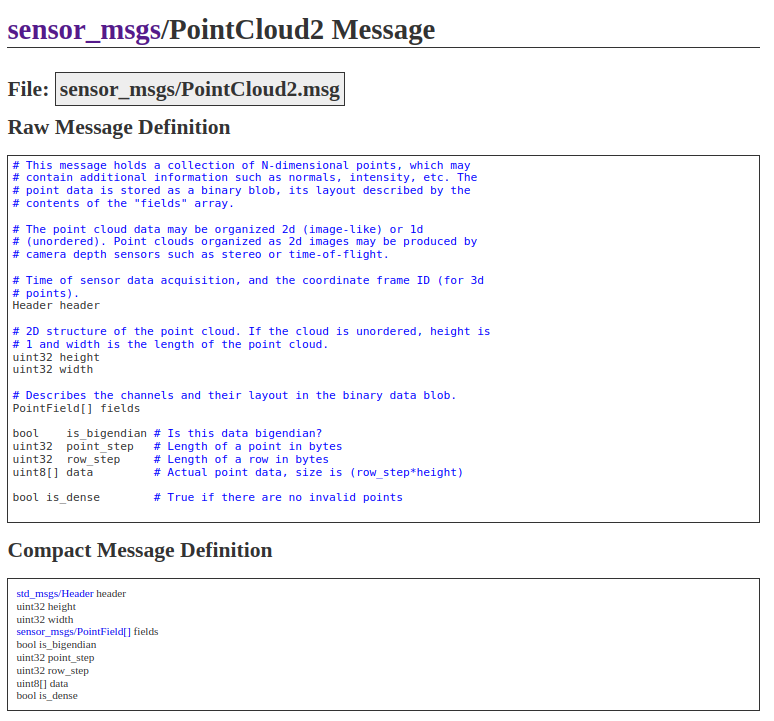
檢查一下兩個節點用到了哪些函式庫,記得新增進package.xml和CMakeLists.txt
這次兩個節點用到了rclcpp和std_msgs~
<depend>rclcpp</depend>
<depend>std_msgs</depend>
舉一反三,如果用到點雲格式的話就需要<depend>sensor_msgs</depend>
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)
#可以幫cpp檔新增進executable
#有加可以: ros2 run cpp_pubsub talker
add_executable(talker src/publisher_member_function.cpp)
# executable依賴函式庫
ament_target_dependencies(talker rclcpp std_msgs)
# 有新增executable記得這樣才找的到!
install(TARGETS
talker
DESTINATION lib/${PROJECT_NAME})
# 以此類推 subscriber
add_executable(listener src/subscriber_member_function.cpp)
ament_target_dependencies(listener rclcpp std_msgs)
install(TARGETS
talker
listener
DESTINATION lib/${PROJECT_NAME})
cd ~/ej_ros2_ws
# 檢查依賴
rosdep install -i --from-path src --rosdistro foxy -y
# 編譯指定package
colcon build --packages-select cpp_pubsub
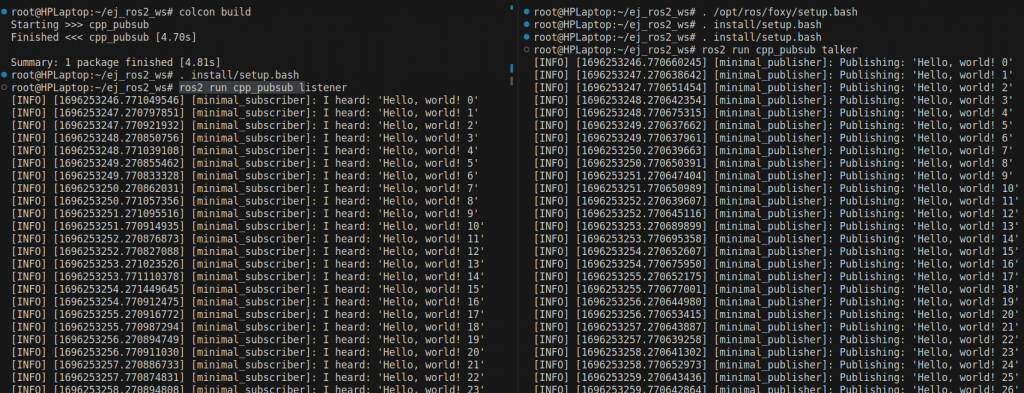
# 開兩個~/ej_ros2_ws terminal
. install/setup.bash
#1
ros2 run cpp_pubsub talker
#2
ros2 run cpp_pubsub listener


 iThome鐵人賽
iThome鐵人賽