人型機器人(Humand Droid)十年之內可能還沒辦法有成熟的技術,因為自由度太多,非常難控制,就算能控制,能做的動作也有限,但是只有控制手,相對簡單一點,故近來重大的技術進步都是因為有了機械手臂(Robot Arm), 或是加上腳或輪子(AMR-Autonomous Mobile Robot),變成掃地機器人加手臂的意思。
機械手臂技術已廣泛應用於工業自動化、醫療手術、農業收穫與協作機器人等領域;從結構分類到感測控制再到AI輔助,研究正向更高靈活度、可靠性與智慧化方向發展。
不同結構適用於各產業需求:
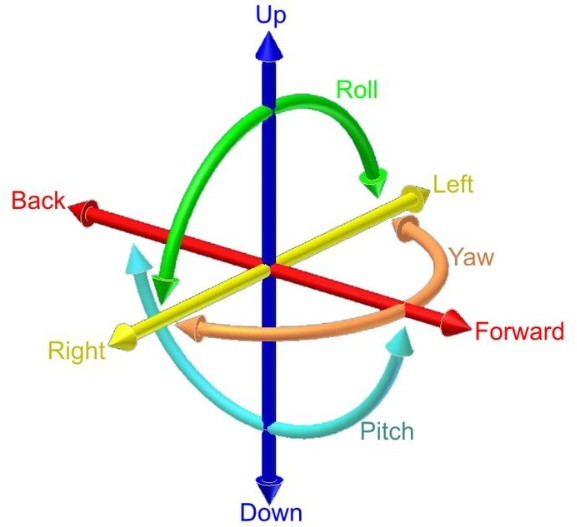
註:自由度(Degrees of Freedom, DOF)指一個系統或物體在空間中能獨立運動或變換位置的最少參數數量。簡單的來說就是關節運動的程度,X/Y/Z是3個自由度,但繞X/繞Y/繞Z也是3個自由度。6 DOF 是工業機器人標配;最多 DOF 可達 100 以上(仿生機器人全身),但多數應用 6~7 DOF 為最實際選擇。
機械手臂的應用場景非常的多,大到怪手,小至達文西手術臂,都是機械手臂的一種,這邊要探討的是協作型手臂(Cobots),故名思義,就是Collaborative Robots,「專為在人機共同工作空間中,與人員直接互動設計之機器人系統」。
主要生產的廠商與品牌如下:
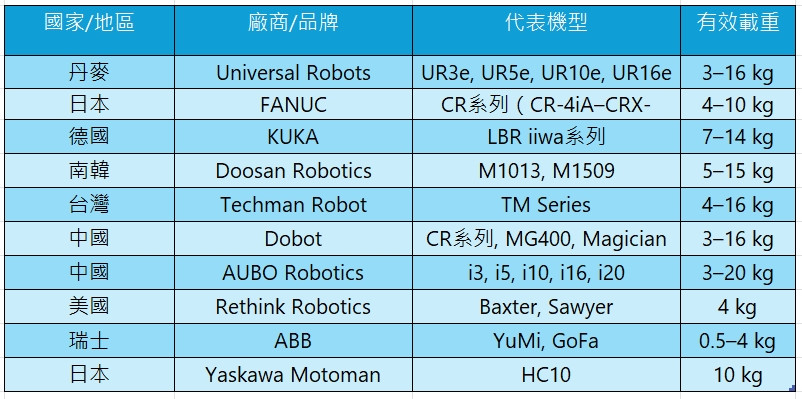
這些協作型機器人在2025-2045年將是人類的好幫手,協助人類邁向工業5.0的時代。
Reference: 六自由度

